
Adaptation Profiles in First-Time Robot Users: Towards Understanding Adaptation Patterns and Their Implications for Design
Juan Montalván 1,*, Heesun Shin 2, Francisco Cuéllar 3, and Kunpyo Lee 1
1 Department of Industrial Design, KAIST, Daejeon, South Korea
2 Graduate School of Science and Technology Policy, KAIST, Daejeon, South Korea
3 Center of Advanced Manufacturing Technologies, PUCP, Lima, Peru
As the presence in our homes of robotics and other automation technologies increases, the diversity of the contexts in which people adapt to these new technologies also increases significantly. This scenario calls for a better understanding of the contextuality of adaptation in order to reveal how differences in adaptation patterns appear. For this purpose, two countries with different technological conditions, Peru and South Korea, were chosen for study, building on previous research in Europe and the USA. Four Peruvian and four Korean families were each given a robot vacuum cleaner, and their adaptation processes were followed in detail over six months. During this time the researchers visited the families periodically, employing Likert-scale questionnaires, semi-structured interviews and generative tools, and the families contributed through periodical video recordings and social media tools. After a combination of ethnographic interpretation, behavioral analysis and grounded theory procedures, distinctive adaptation patterns, and the main elements influencing them, were identified. Then an adaptation profiles framework (APF) was developed, elaborating on the existing relationships between adaptation patterns and these elements, and five distinctive adaptation profiles were defined. Finally, design implications for improving adaptation were drawn, taking into consideration the multiple forms in which it is manifested.
Keywords – Adaptation Profiles Framework, Contextuality, Human Adaptation to New Technologies, Multi-Sited Ethnography, Robot Vacuum Cleaners.
Relevance to Design Practice – Current studies present adaptation as a phenomenon with fixed, universal characteristics. Through this study we have identified noticeable differences between adaptation patterns and presented them in the form of five distinctive adaptation profiles thanks to the development of the adaptation profiles framework. From these, implications for improving adaptation were derived.
Citation: Montalván, J., Shin, H., Cuéllar, F., & Lee, K. (2017). Adaptation profiles in first-time robot users: Towards understanding adaptation patterns and their implications for design. International Journal of Design, 11(1), 1-19.
Received June 14, 2016; Accepted February 13, 2017; Published April 30, 2017.
Copyright: © 2017 Montalván, Shin, Cuéllar, & Lee. Copyright for this article is retained by the authors, with first publication rights granted to the International Journal of Design. All journal content, except where otherwise noted, is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 2.5 License. By virtue of their appearance in this open-access journal, articles are free to use, with proper attribution, in educational and other non-commercial settings.
*Corresponding Author: jgmontalvan@kaist.ac.kr
Juan Montalván earned a Bachelor of Arts in Industrial Design from the Pontifical Catholic University of Peru (Pontificia Universidad Católica del Perú, PUCP), and a Master of Science in Industrial Design from the Korea Advanced Institute of Science and Technology (KAIST). He is currently a member of the Research Group in Industrial Design (GRID) at PUCP, and serves as a researcher in the field of Human–Robot Interaction and Social Robotics. He also performs scholarly work in the fields of Science, Technology and Society, and Human-Centered Design, aiming to contribute to the emerging conceptual discourse on Humanistic Design. In the practical field, he has exhibited his work in various national and international exhibitions and is also the cofounder and CEO of Masi Studio, a product design and development consultancy based in Lima, Peru, which has provided its services to various companies in local industry.
Heesun Shin holds a Bachelor of Science in Civil and Environmental Engineering with minor in Science and Technology Policy from KAIST, and a Master of Science in Science and Technology Policy from the same university. Currently she is continuing her studies in the Graduate School of Science and Technology Policy at KAIST as a PhD student. Her research interests focus on the social problems unintentionally caused by newly created technologies or machines, and she seeks to explore how science, technology, and society appear intertwined within these dynamics in order to suggest desirable directions in which science and technology should proceed.
Francisco Cuéllar earned a Bachelor of Science in Electronics from PUCP, a Master of Science in Mechatronics from Kings College London, and a Master’s in management and Politics of Innovation and Technology from PUCP, and is a PhD candidate in Robotic Intelligent Systems at Osaka University. Currently he is the Director of the Center of Advanced Manufacturing Technologies (CETAM) and an Associate Professor in the Engineering School at PUCP. He is a founder of the Group of Innovative Technology (GIT) at PUCP, which executes government-funded innovation projects for industry (Innovate Perú), publishes scientific papers, and generates intellectual property.
Kunpyo Lee is an Honorary Fellow of the Design Research Society, is a professor and head of the Dept. of Industrial Design at KAIST, South Korea, is Director of the department’s Human-Centered Interaction Design Lab, and is also serving as President of the International Association of Societies of Design Research (IASDR). He studied design at Joong Ang University (BFA) in Korea, at the Institute of Design, Illinois Institute of Technology (MS) in the USA, and at the University of Tsukuba (PhD) Japan. For some years, he was in charge of designing entire product lines as head of the Corporate Design Center and Executive VP at LG Electronics. His research interests include design planning, user-centered design, UX, design innovation, design strategy, and, more recently, platform design.
Introduction
With every new product entering the market, an adaptation process takes place. From a human-centered design perspective, this raises important questions: How far does our understanding reach as to how people actually come to accept and adapt to these new products? How can designers know that the product they are developing is, in the words of Raymond Loewy (1951), “most advanced, yet acceptable” (p. 277) enough for people to make it part of their lives? Furthermore, which are the elements that a successful adaptation depends on? How do they differ from people to people, country to country, product to product? What can be considered as new technology in the eyes of users generally varies based on its degree of novelty, from a specific improvement in one of the features of a known product, to a major breakthrough that gives birth to a new product typology about which little is known. The latter is expected to be the case with robotic products (Tobe, 2015), whose high degree of automation in movement, perception, cognition, and action (M. Kim, Oh, Choi, Jung, & Kim, 2011) represents a major shift in how people perform and think of given tasks, thus having an influence on their lifestyles. Additionally, they present a major challenge for first-time users to adapt to and get familiarized with them.
Moreover, this study’s contextual scenario highlights an imminent expansion in domestic robot technologies (Ballve, 2014; Tobe, 2015), and a market expected to grow at a compounded annual growth rate (CAGR) of 37.8% from 2016 to 2022 (P&S Market Research, 2016), and to be valued at 9 billion USD by 2025 (Sander & Wolfgang, 2014). This context creates a need for developers and designers alike to understand how people will come to accept robotic products and adapt their current lifestyles to them.
In this regard, domestic robotic products have had significant success particularly in the market for robot vacuum cleaners (Ballve, 2014). The first prototype of a robot vacuum cleaner was developed by the Swedish appliance company Electrolux in 1997, and such a product was introduced into the market a few years later (National Academy of Engineering, 2016). However, it was in 2002 that these robotic products became a major success with the introduction of the Roomba by the American company iRobot, attracting major manufacturers to the robotic floor cleaning market, including LG, Samsung, Neato, and Hoover (Ballve, 2014). Accordingly, several studies have been conducted to understand the nature of the interactions such products elicit, not only from the standpoint of robot engineering (Breazeal, 2002; Brooks, 2008; Kanda, Sato, Saiwaki, & Ishiguro, 2007), but also from those of the social sciences (Duffy, 2003; Robertson, 2014) and design (M. Kim et al., 2011; Lee, Sung, Šabanović, & Han, 2012). More recently, research studying the characteristics of such interactions over extended periods of time (Sung, Grinter, & Christensen, 2010) has given initial insights into the adaptation process.
However, as robot vacuum cleaners have continued to gain in popularity with households, it has become evident that there is a need for a systematic way of identifying the nature of the interactions they provoke—a way that considers contextual variations (Fink, Bauwens, Mubin, Kaplan, & Dillenbourg, 2011), bearing in mind not only that robotic products themselves possess particular social attributes that evolve over time (Sung, Christensen, & Grinter, 2009), but also that the adaptation process generally depends on the users’ own perceptions and attitudes towards any new technology or system (Davis, Bagozzi, & Warshaw, 1989).
Thus this study was seen as an opportunity to deepen our understanding of how people adapt to new technologies, by taking Samsung’s Powerbot VR9000 (see Figure 1) into two significantly different scenarios: one in a country with more than a decade of history of robot vacuum cleaners in the market and a strong interest from the government in having robotic products in every home (Weng, Chen, & Sun, 2009), as is the case in South Korea; and the other in a country that does not yet have an established robotic products market, as is the case in Peru (Ballve, 2014). This situation presented a good opportunity to compare adaptation processes in households in countries with significantly different cultures, lifestyles, backgrounds, and product-related levels of novelty, perceptions and expectations, despite none of the families having previously experienced using robot vacuum cleaners. Also, these characteristics position these two countries at two possible extreme standpoints, from which we can reflect and set a reference on how these characteristics influence the adaptation process.

Figure 1. Samsung’s Powerbot VR9000 robot vacuum cleaner (photo from http://www.samsung.com/).
Literature Review
Adaptation to New Technologies
Understanding adaptation requires exploring also the processes that precede and succeed it, including the learning and habituation processes that provide part of the context for adaptation. In this regard, Piaget (1936/1952) viewed intellectual growth as a process of adaptation (adjustment) to the world. And in a contemporary revision of Piaget’s work on cognitive theory (Wadsworth, 2004), adaptation is understood as the set of physical and cognitive activities triggered by a new situation in which the person cannot progress by using his current mental schemas.
Adaptation, referred to as equilibration by Piaget, is the process that enables the transition from a state of disequilibrium towards one of recovered equilibrium through the activities of accommodation (modifying the existing schema and testing) and assimilation (becoming convinced of the reliability of the new schema) until returning to a state of equilibrium. Once the new information is acquired, the process of assimilation with the new schema will continue until the next time there is a need to make an adjustment to it. From this, it can be inferred that a constant state of equilibrium allows habituation to occur, while a constant state of disequilibrium can be understood as a constant learning process.
Moreover, in a contemporary synthesis on learning and behavior (Bouton, 2007), three main concepts were revised: 1) habituation: a result of learning in which the organism decreases or ceases its response to a stimulus after repeated presentations; 2) sensory adaptation: a reduction in the sensitivity of neural and sensory receptors during a continuous, unchanging stimulus; and 3) sensitization: the opposite to habituation, i.e., an increase in the elicited behavior from repeated presentation of a new stimulus. In line with these definitions, Domjan (2014) stated that in the process of learning there may be an initial increase in response immediately prior to a decline (a sensitization process, followed by the beginning of the habituation process).
Regarding the process of adoption of new technologies, three theoretical models are of significant importance: 1) the technology adoption life cycle (Moore, 1991): An adaptation of an earlier model called the diffusion process developed by Beal, Rogers, and Bohlen (1957), it describes the process of adoption, acceptance, and eventual decline of new technological innovations at a macro, societal level. Moore included the gap or chasm that new technologies are challenged to cross from the early adopters to reach the early majority. 2) The Gartner hype cycle (Fenn, 1995): This describes the market’s initial enthusiastic response to emerging technologies, the following disappointments as those technologies face challenges in use, and the gradual understanding of real benefits from them. It divides the process into five stages: innovation trigger, peak of inflated expectations, trough of disillusionment, slope of enlightenment, and plateau of productivity. 3) The technology acceptance model (Davis et al., 1989): One of the most influential extensions of Ajzen and Fishbein’s (1980) theory of reasoned action, TAM is the most widely applied model of users’ acceptance and usage of technology. It explains how people form attitudes and intentions towards trying to learn a new technology prior to initiating efforts directed at using it.
In addition to these models, domestication theory (Silverstone & Hirsch, 2005), an approach from science and technology studies, made significant contributions regarding qualitative descriptions of the process by which new technologies are generally adopted by users. It divides the process into three stages: First, technologies are appropriated into everyday life and adapted to daily practices. Then, users and the use environment change and adapt accordingly. Finally, these adaptations feed back into innovation processes in industry, shaping the next generation of technologies and services. This rich descriptive approach considers both the practical and the symbolic aspects of the adoption and use of technologies, showing how the meanings of things, and their materiality, are equally important for understanding how technologies become part of everyday life. Compared to the previous models, domestication studies are generally done using qualitative methods, such as long interviews and ethnography, to explore the emerging meanings of technologies, changing routines, and conflicts that would not normally be accessible to quantitative methods.
Finally, from an empirical perspective, a variety of studies have been conducted in different fields using ethnography to examine adaptation to new technologies, with a fairly large number using robotic products (e.g., Forlizzi, 2007; Friedman, Hall, Kahn, & Hagman, 2003; Kubo, 2013; Sung, Guo, Grinter, & Christensen, 2007). These studies reached significant findings by conducting long-term ethnographic studies in the natural settings of interaction, also framed as a field study approach (Koskinen, Binder, & Redström, 2008).
Long-Term Interactions with Robots
Robotic products are particular cases to analyze due to their capability to elicit an emotional response in humans (Forlizzi, 2007). These unique animistic qualities have been widely studied across a variety of robotic products such as Aibo (Melson et al., 2005), Roomba (Sung, Grinter, Christensen, & Guo, 2008), Paro (Chang & Šabanović, 2015), and Robovie (Šabanović, Reeder, Kechavarzi, & Zimmerman, 2011).
With similar intensity, long-term human–robot interaction studies have been conducted in a variety of settings which include workplaces (Huttenrauch & Eklundh, 2002; Pacchierotti, Christensen, & Jensfelt, 2006), schools (Kanda et al., 2007), hospitals and health care centers (Pacchierotti et al., 2006; Mutlu & Forlizzi, 2008) and domestic environments (Forlizzi & Disalvo, 2006; Odom et al., 2014; Sung et al., 2010). These studies have proven in their various scenarios that interaction patterns change after the initial novelty factor has faded away. In some cases, the interaction evolves into forms of affection (Leite, Martinho, Pereira, & Paiva, 2009), as noticed in a study with Paro, a baby seal robot, over three months with children at a center for mental health. In others, it evolves into a sense of belonging. At an elementary school in Japan, Kanda et al. (2007) described how the robot Robovie succeeded in merging into the classroom environment thanks to its autonomous interaction over a nine-week timespan. Moreover, there are other cases where participants’ interactions started to decline as a result of habituation to the point of completely losing interest in the robot (Huttenrauch & Eklundh, 2002), or moving their attention to other priorities (Pacchierotti et al., 2006).
But perhaps the most comprehensive studies have been those conducted in the domestic space. They have ranged from pioneering studies that provided initial frameworks for understanding the nature of long-term human–robot interaction (Forlizzi, 2007; Sung et al., 2009; Young, Hawkins, Sharlin, & Igarashi, 2009), through studies that sought to corroborate and improve those initial models (Fink, Bauwens, Kaplan, & Dillenbourg, 2013), to studies that searched for less conventional ways of interaction that in turn triggered new responses such as desire for more control (von der Pütten, Krämer, & Eimler, 2011) or unexpectedness and anticipation (Odom et al., 2014). These studies contributed both by providing empirical evidence on the different manifestations of long-term interaction and by suggesting design implications for its future improvement. Adding to this body of knowledge, Sung (2011), in a study that is the conclusion of previous significant work by the same author (Sung et al., 2007, 2008, 2009, 2010), describes the long-term interaction as having four defined temporal stages: pre-adoption, adoption, adaptation, and retention, and explains how the robot varies its agency between stages. On this basis she developed guidelines for robotic product design.
Furthermore, von der Pütten et al. (2011) stated that the circumstances in which the participants live have an influence on their treatment of the robot, referring to the location of the robot as well as the social context. And Gockley, Forlizzi, & Simmons (2006) gave an account of the importance of environmental factors, such as the number of people involved in the use and when the robot is used. However, there are as yet few studies that look more deeply into this issue and seek to reveal the nature of the relationships between adaptation behaviors and the environment, understood as the physical, social and technological context in which users engage with robots (Venkatesh, Kruse, & Shih, 2003).
Robots for the Domestic Environment
The development of robotic products for the home has seen continuous progress both commercially and in sophistication (Tobe, 2015). The clearest example of this progression is the Roomba series, which was one of the first successful robot vacuum cleaners, introduced in 2002. Since then, various companies have entered this market, along with new robotic products, capable of mopping the floor, mowing grass, and even cleaning windows. However, 2016 appeared as a pivotal moment in robot development (Tobe, 2015; Kaul, 2015), as a new generation of robots were presented to the market (e.g., Jibo, Buddy, Echo, Pepper) with significantly more complex social capabilities, and embedded Internet of Things functionalities.
On the users’ side, the domestic environment is a very particular and complex setting as well. Fink et al. (2011) suggest that the family’s perceptions as a whole have an influence on each family member’s preferences. In addition, the physical space also plays an active role in the difficulty for the user and robots to co-adapt (Bauwens & Fink, 2012). Furthermore, in a study in Korea, H. Kim, Lee, Chung, and Kim (2007) identified that there are behavioral trends that persist in every household. These studies shed light on the influential relevance of domestic environments with regard to adaptation patterns. However, there is still little information regarding how the particular traits of families (e.g., different backgrounds, perceptions, expectations) influence these patterns.
Sociocultural Contextuality
This being a study that involves two considerably different countries, and due to the relevance of context in an ethnographic study, it is important to mention some framing studies that help place Peru and Korea within a cultural and social spectrum. Widely accepted approximations to understanding culture are attributed to Hofstede (Hofstede & Hofstede, 2005), whose work was based on definitions of culture that incorporate Boasian postulates (Boas, 1911), such as the one offered by Bates and Plog (1990), for whom culture can be defined as:
… the system of shared beliefs, values, customs, behaviours and artifacts that the members of a society use to cope with their world and with one another and that are transmitted from generation to generation through learning. (p. 7)
In line with this definition, and building upon Hofstede’s work, van Boeijen (2015) presents evidence of the influence of sociocultural dimensions on product acceptance, using the term material culture to relate to artefacts or things. In the robotic product realm, Šabanović, Bennett, and Lee (2014) adopted a critical approach that acknowledged the co-construction of culture, scientific practice, and technology design, as well as the dynamic nature of culture and its role in shaping human cognition and social interaction. Moreover, in a cultural comparison study between preferences regarding robotic products in the US, Korea, and Turkey, Lee and Šabanović (2014) found that Korean participants preferred social robots to be subservient to humans, and that in both Korea and Turkey, mothers appeared to be the most common users, reflecting social dynamics over the division of roles. Furthermore, in another study (Lee et al., 2012), the same authors discovered that future automated home technologies are interpreted in Korean homes in relation to social roles and hierarchies in response to a collectivist model of interaction, as opposed to an individualist approach in the US. The authors believed this was also related to culturally variable conceptions of the home as relationally oriented in Korea, and functionally defined in the US. Unfortunately, there have not been similar studies that include Peruvian users in their samples. However, several researchers (Bartneck, Nomura, Kanda, Suzuki, & Kensuke, 2005; Geraci, 2006; Kaplan, 2004; MacDorman, Vasudevan, & Ho, 2009) have claimed that media portrayals of robots as positive and friendly or negative and threatening, as well as religious and social beliefs, strongly influence the popular image of robots in countries as diverse as Japan and the US.
Overall, this body of literature covering adaptation, new technologies, long-term interaction, robotic products, domestic environments, and sociocultural contextuality, reveals some interesting issues:
- The relevance of studying contextuality in adaptation in order to reveal how differences in adaptation patterns appear, particularly in the context of an expected imminent expansion of the domestic robot market worldwide (P&S Market Research, 2016).
- The limited number of studies that try to understand the nature of the relationship between adaptation behaviors with robotic products and the domestic environment, at a physical, social, and technological level (Venkatesh et al., 2003).
- The value of a comprehensive study tailored specifically to understand how the particular traits of families (e.g., different backgrounds, lifestyles, perceptions, expectations) influence adaptation.
These three points can also be interpreted as introducing layers of depth into the general theme of adaptation to domestic robots, where the third layer offers a closer look into a rich account of details, specificities and particularities of the adaptation process.
For the present study, three main objectives were elaborated based on these points: 1) To register shifts in adaptive behavior over time, through detailed accounts of the participants’ experiences over a period of six months, along with the symbolic meanings given to the robot within the mix of everyday life significances. 2) To develop a theoretical framework that provides a comprehensive explanation of how differences in adaptation patterns appear, throwing light on the main elements that cause variations and providing a theoretical basis for making systematic comparisons among family members, households, and countries. 3) To extract from this understanding applicable implications and considerations for designers in order to improve the adaptation experience while reducing the chances of rejection.
Study Design
The Robotic Product
Powerbot VR9000 was Samsung’s latest release as of 2016, valued at approximately 1 million KRW (approximately 850 USD). Among its main features is a technology called Cyclone Force which generates strong centrifugal forces that separate dirt and debris into an outer chamber to reduce filter clogging and maintain suction power. It also contains an integrated digital camera and nine individual sensors that help it determine the optimal cleaning path by creating a complete map of the home, and has 105 mm diameter wheels that help it go over different surfaces like the edges of rugs. It came with a remote controller with an interesting feature called Point Cleaning that allows the user to point a light beam into a specific area to which the robot will go for cleaning.
Participant Selection
Insights obtained from a preliminary focus group interview conducted in Korea, as well as reviewed cases from similar studies (Forlizzi & Disalvo, 2006; Sung et al., 2010) and the shared experience of other researchers served as criteria for deciding to focus on families rather than on people living alone or couples, as previous results have indicated that families are more likely to engage with robotic products for longer periods of time and form stronger bonds that relate to the significances of the home. Moreover, the diversity of family members offers a richer variety of experiences and gives scope for more complex social interactions.
Initial screenings were performed, based on demographic data from Korea (Choi et al., 2013) and data from the Institute of Public Opinion of the Pontifical Catholic University of Peru (PUCP), in order to define the most representative family characteristics for Korea and Peru. The constraints given for the Korean families based on the demographic data were that they should have three to four family members, live in apartments, receive an annual income within the range of 30,000 USD to 90,000 USD, not have pets, and never have used a robotic vacuum cleaner before, and that the parents should have a minimum education of undergraduate level. In the case of the Peruvian families, the constraints were similar except in that they were requested to be living in houses, to have a family composition of four to five members, and to have pets.
The participants were recruited by using promotion brochures (see Figure 2) informing about the characteristics of the study, the research goals, and the selection requirements. The brochures were distributed in pre-selected residential areas. We visited the families that contacted us to confirm they met the requirements and to talk about their motivations for participating in the study. Some families had significant motivations that supported their desire for having the robotic product, while others were clearly just curious about the study or did not have any strong reasons why they wanted to use the robot. From this group of households, the final four families for each country that we considered best suited the goals of the study were selected.

Figure 2. Promotion brochure used for participant recruitment in Korea, translated into English.
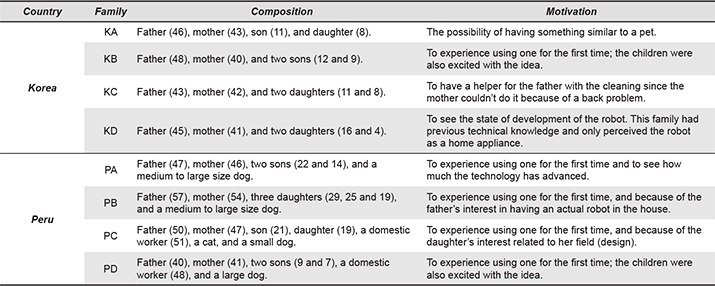
The final families selected in Korea lived in Daejeon Metropolitan City and the ones in Peru lived in the capital city, Lima (see Table 1 for details). Each family was given a Powerbot VR9000, which was also their reward for participating in the study. However, the agreement was that the robot became their property from the moment the study started, meaning that the families had total freedom as to what they did with the robot and how they used it, in order to ensure the naturalness of their interactions and adaptation process, as if they had bought the robot themselves.
Table 1. Participant families and their motivations for acquiring Powerbot.
Multi-Sited Ethnography
Based on previous studies on long-term interaction with different products including robot vacuum cleaners (Sung et al., 2010), six months was determined as an appropriate time for conducting this experiment. This allows each family to get familiar with the product and establish their own routines, especially as they are facing products they have never used before. Thus, simultaneously in Korea and Peru, six periodic visits were made per family over this timeframe, making a total of 48 visits along with additional tools such as blueprints (floor plan sketches), Likert-scale questionnaires, generative tools, social media applications, and periodical video recordings. Contextual information about the two countries’ characteristics is given next:
- Korea: A country with a total population of approximately 50 million citizens, a population density of 507/km2 and a GDP per capita at purchasing power parity (PPP) of 37,000 USD. Public officials have expressed to the international media their ambitions for achieving a human–robot co-existence society by the year 2030 (Lovgren, 2006). Additionally, robot vacuum cleaners have been in the market for over 10 years and are perceived as a familiar, local technology by the public. Regarding the domestic environment, the home is considered as a highly private space, while the preferred locations for social encounters are public spaces, such as coffee shops. The average family size is 2.7 persons per household. The proportion of families with dual income and families with one parent staying at home is even. There is a general absence of domestic workers. Approximately 13% of households have a small pet (Choi et al., 2013).
- Peru: A country with a total population of approximately 31 million citizens, a population density of 23/km2 and a GDP per capita at PPP of 13,000 USD. The lay public generally have critical thoughts as to whether new technologies should be considered as a necessarily positive asset for their lives. As yet there is no established robotic product market despite some sporadic incursions in past years. For this reason, this technology is perceived as foreign and special by the public. Regarding the domestic environment, the home is considered as an ideal space for socialization, where regular social encounters with relatives and friends take place. The average family size is 5.1 persons per household in urban areas. Additionally, in urban areas there is a predominance of families hiring regular domestic workers, in some cases more than one, and usually living in the home. Approximately 67% of households have at least one medium-sized pet (information obtained from the Institute of Public Opinion at PUCP).
Video Recordings
The initial plan for video recording was, with the families’ prior consent, to place cameras in the living rooms of all the households to record at the times when the families used the robots by scheduling the cameras via Wi-Fi. However, during the pilot period, several inconveniences with this video recording technique were identified, such as connectivity issues and logistics, which threatened to make the experiment a tedious experience for the participants. For this reason, the final solution was to remove the cameras and ask the families to record with their own cameras once every two to three weeks.
Social Media Tools
Social media applications such as Facebook Groups and WhatsApp for the Peruvian families, and equivalent applications such as BAND and KakaoTalk (popular Korean applications) for the Korean families, were employed to allow them to post photos, videos, and comments at any time. These tools proved to be surprisingly effective for filling the gaps between visits and countervailing the video recording limitations. Also we noticed that the Korean families were more eager to use them and one family even continued uploading information sporadically after the experiment was concluded. By contrast, the members of the Peruvian families who posted images and comments were almost exclusively the sons and daughters and their posting rates were lower on average (see Figure 3).
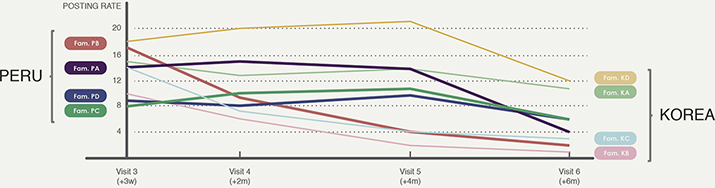
Figure 3. Number of posts by all families over time.
Periodical Visits
As mentioned before, six periodical visits were made to each family. The first was one week before the families received the robots, to inquire about their expectations. In the second visit we delivered the robots and observed the families’ first impressions. In the third visit, three weeks after delivery, we focused on the families’ learning behavior. In the fourth, two months after getting the robot, we observed the beginning of habituation. In the fifth, four months after receiving the robot, we could see the established routines, and learn about the families’ decisions as to retention of the product. And finally, in the sixth visit, after six months, we inquired about the maintenance of their routines and whether their decisions as to retention or rejection had changed.
Additionally, during each visit, we administered Likert-scale questionnaires regarding their functional, emotional, and relational (social) appreciations of the robot, as well as employing blueprints (see Figure 4), which were sketches drawn by the participants to visualize the areas in the house where they used the device most and the sequence in which they used it.
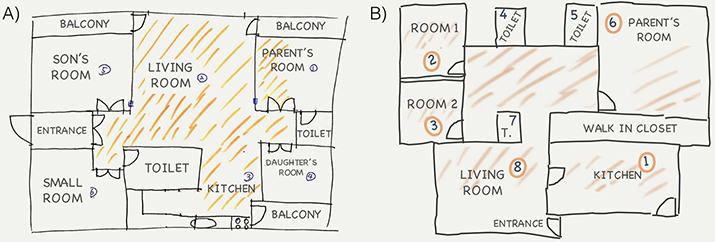
Figure 4. Examples of blueprints from family KA in Korea (A) and family PD in Peru (B).
Generative Tools
Starting from visit four (beginning of the habituation process), different generative techniques were employed in order to reveal the development of the families’ habituation. These were as follows:
- A Day in My Life: An adaptation of the customer journey map. The objective was to find out the sorts of activities families performed during a typical day, marking the hours spent through the day and the times when they used the robot (see Figure 5).
- Robot’s Week: A simple chart showing the days of the week and the hours. The objective was to find out the times when the robot was commonly and circumstantially employed throughout the week (see Figure 5).
- Activity List: A list containing 14 activities (see Figure 6) and a valuation table for their frequency progression over the months. The objective was to find out the frequency with which each family member performed a wide variety of activities related to robot usage and other kinds of interactions with the robot. For this purpose, this tool was contrasted with the participants’ testimonies of use and the raw data collected during the visits.
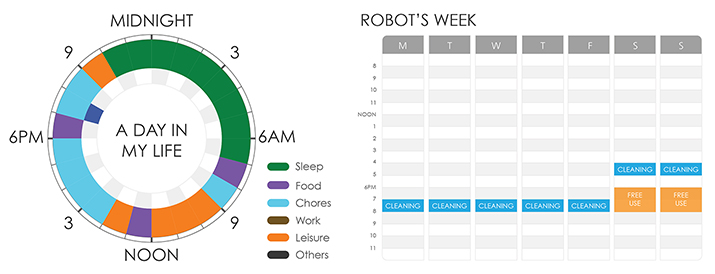
Figure 5. Examples of an “A Day in My Life” diagram (left) and a “Robot’s Week” chart (right), both from family KA.
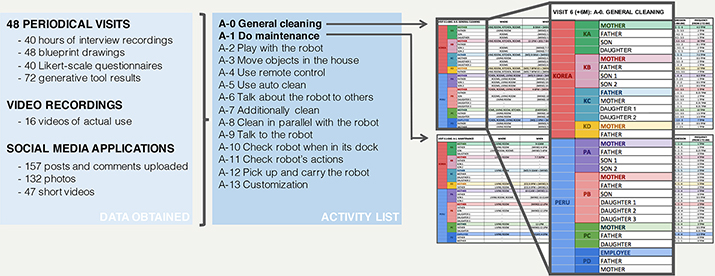
Figure 6. Behavioral analysis for each family member based on the main activities and raw data.
Analytical Strategies
Ethnographic Interpretation
By the end of the study, 48 periodical visits had been performed, generating a total of 40 hours of interview recordings, 48 blueprint sketches, 40 Likert-scale questionnaires, 72 generative tool results, 16 long videos of actual continuous use, and 336 posts on media platforms, including comments, photos, and videos. All this information was classified for each family by employing the activities, environment, interaction, objects, and users (AEIOU) framework, and adding to this classification the temporal dimension. The objective of the ethnographic interpretation was to capture detailed accounts of the participant’s experiences over the period of six months. We were also interested in understanding what the robot vacuum cleaner symbolized to the family members within a mix of everyday life meanings. For this analysis, we employed existing frameworks (mentioned in the Literature Review, above) that give cues as to what to expect from the adaptation process. Also, the results from the Likert-scale questionnaires, the participants’ testimonies from each interview, the frequency results taken from the activity lists, and the media data (videos, photos, and comments) that the families had uploaded up to the day of each visit, allowed the reconstruction of the adaptation patterns of each family, building the patterns as the visits were executed and the data collected. This analytical strategy contributed in various ways throughout this research, such as in the elaboration of the stages of adaptation, the family profiles, the definition of contextual novelty, the definition of the families’ standards, the classification of the key differences and similarities, and the conception of the adaptation profiles framework, and also as a rich account of experiences and insights for the development of the implications for design..
Behavioral Analysis
The behavioral analysis consisted in mapping all the activities in the activity list within the AEIOU framework by asking the questions “Who did it?” “Where?” “When?” “Why?” “How?” “How often?” and “How consistently?” for all the family members (see Figure 6). The raw data collected was essential in order to be able to answer these questions (e.g., blueprint drawings were consulted in order to know exactly where each specific activity was performed). This process added more consistency to the qualitative interpretations as well as providing new insights regarding the adaptive behaviors and their similarities and differences between countries, families and family members. Moreover, this analysis contributed to the corroboration of adaptation patterns and the definition of family profiles and families’ standards, provided empirical support for the adaptation profiles framework, and yielded criteria for the development of implications for design.
Grounded Theory
Grounded theory is a methodology for the systematic generation of theory from conceptual categories. These concepts/categories are related to each other as a theoretical explanation of the actions and events occurring in a contextualizable environment. In this study the Glaserian grounded theory method was employed. It is characterized by focusing on finding core variables and then trying to materialize them by suspending all preconceptions and forcing the rejection of their validity, which will eventually trigger the emergence of concepts from the data. As this method avoids descriptive interpretations that look for representativity of populations, in favor of abstract conceptualizations that facilitate the discovery of stable patterns in the data, it is not only applicable to qualitative as well as quantitative data, but more importantly is a method that gives validity to studies that seek to frame a phenomenon rather than framing people. In this case, the aim was to understand the adaptation process and its core variables, rather than the specific representativities of adaptation in Peru and Korea.
Understanding the Adaptation Process
Adaptive Behavior
The adaptive behavior identified by the behavioral analysis makes evident the participants’ behavioral shifts over time. For instance, during the initial month, activities such as “talking to the robot” and “playing with the robot” showed high frequencies, especially among the younger members of the families. Additionally, the parents presented high activity on “talking about the robot” with others and “moving objects in the house” to allow the robot to move freely. However, as time went by, the children reduced drastically their frequency of “playing with the robot,” and parents also stopped “talking about the robot.” It is interesting to note, however, that some activities persisted and even increased over time, especially those related to pragmatic considerations such as “additionally cleaning after the robot has finished” and “cleaning in parallel with the robot.” This aligns with the claims by Cowan (1983) about technology making people work more, instead of making them spend less time on chores and other activities. Despite the robot being helpful for cleaning, the participants did not notice right away how “much cleaner” their houses had become; instead, users gradually became habituated to their new, higher cleaning standards. Many families only reflected about their houses being actually cleaner than before starting the study when they reduced the usage of Powerbot for an extended period of time, and observed “how dirty” their houses became. Another interesting activity that persisted over time was “talking to the robot,” although it was mainly among the Korean families. The most convincing argument for this seems to be the presence of pets in the Peruvian homes, which reduced the opportunity for the owners to engage emotionally with their robot.
Stages of Adaptation
For this section, we referred to the four temporal stages of adaptation presented in the domestic robot ecology framework (Sung et al., 2010), to which we added two more stages based on continuous and detailed observation from the second to the sixth month, and on matching the characteristics of the participants’ adaptive behaviors with the steps of adoption and usage in Davis’ technology acceptance model (Davis et al., 1989). The six temporal stages we applied are pre-adoption, adoption, exploration, learning and adaptation, habituation, and future retention (shown in Figure 7), the two added stages being exploration and habituation.
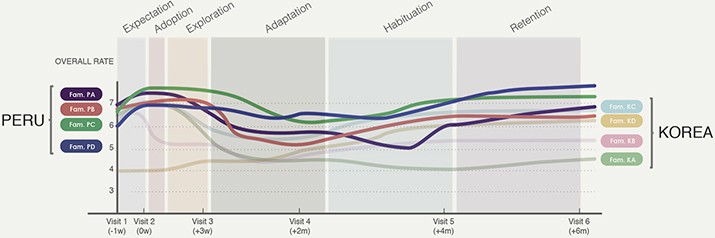
Figure 7. Adaptation patterns of Peruvian (dark) and Korean (light) families based on product acceptance.
In Figure 7 the stages shown present average estimated durations, as the actual durations for each stage varied among families. Despite that, most families’ adaptation stages were proximate to the durations shown in the graph. However, at the extremes, family KB for instance presented a rather short exploration stage and thus started the adaptation process earlier than others, while family PA presented an adaptation stage that extended well into the fourth month while other families had finished this stage around the third month. In addition to this, the values of the overall ratings measured in order to build the adaptation patterns for each family were calculated after each round of visits by comparing the results from the Likert-scale questionnaires, the participants’ testimonies from each interview, the results from the activity list frequencies, and the media data (videos, photos, and comments) that the families uploaded up to the day of the visit.
Pre-Adoption: Forming Expectations
Our first visit to the families was performed one week prior to the delivery of the robot. Due to the different backgrounds and motivations for having the Powerbot, families built different expectations about it. Family KA expected to have a highly responsive and autonomous device that could match the entertainment and emotional engagement provided by a living dog. At the same time, they expected the robot to be proficient in its role as a vacuum cleaner. Also the advertisement of Powerbot at that time (see Figure 8) portrayed a robot that was able to change its configuration into an anthropomorphic shape, making a direct reference to the Transformers franchise movie that was showing in cinemas. By contrast, family KD had very low expectations as the father had an engineering background and knew about the underlying technology used in the robot, despite having never used one before. He did not expect the robot to be actually capable of cleaning well, but still was curious enough to give it a try. Family PC expected the robot to be a good helper and cleaning companion; the mother had great enthusiasm regarding future technologies and made constant references to movies and popular robots found in media as she explained the reasons why she wanted one to her daughters. Meanwhile, family PD expected the robot to be notably smart and fast as portrayed in the advertisement. Both sons showed high expectations upon the robot’s arrival.
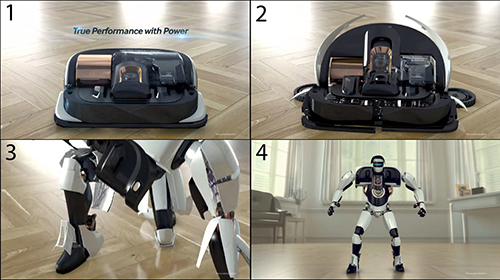
Figure 8. Sequence of screenshots from a television advertisement for Powerbot VR9000 (https://www.youtube.com/watch?v=X1M4Ey5bE3g).
Regarding their cleaning practices before receiving the robot, all the Korean families were used to using traditional upright vacuum cleaners for cleaning all areas of their apartments, which also all happened to have the same type of floor (vinyl planks) with the exception of the bathroom. Generally, families would start from the living room, then move to the kitchen which was situated right next to it and did not have walls or other types of division in all apartments, then move to the bathroom and finish with the parents’ and kids’ rooms (all the Korean families had children). They additionally used a cloth to clean the tables and other raised surfaces, and for reaching small areas some families used a handheld vacuum cleaner as well (families KA and KD). All families had generally fixed schedules for cleaning which could be as frequent as once every day (family KD) and these activities were usually performed by the mother (families KA, KB, and KD). In the case of the Peruvian families, however, the methods and tools were more diverse; the families that hired maids (PC and PD) had more rigid cleaning schedules, whereas the families that did not would share turns and tasks among the family members, related to which some members were recognized to have affinity with certain activities, like the father from family PB, whose “specialty” was the dining room, which he cleaned using a traditional upright vacuum cleaner and a cloth. The cleaning tools also varied depending on the area and type of floor. All the Peruvian families preferred to use a broom and mop in the kitchen area, which was in a separate individual space and had flooring made of ceramic tiles. By contrast, all living rooms had a wooden floor that families would wax and polish with a domestic floor polisher once they finished vacuuming.
Adoption: Getting the First Impression
Our second visit was one week after the first, and this time we brought the robots with us (see Figure 9). As soon as we knocked at the door, we could sense the families’ expectancy and excitement about finally getting to know the robot, including family KD, but at a more moderate level. Family KA quickly put a name to the robot, which they called “Kobot,” Ko being their family name; no other family decided to do so at such early stage. The father read the manual and together they all tried to figure out how to turn the robot on. They also watched YouTube videos on their tablet to see how others used the robot. Overall they seemed satisfied with their first impression. In family KB, the father did not participate in the operation of the robot, and it was the mother and the two boys who figured out how to turn it on. Unfortunately the robot was much slower than they had expected. Family PC’s father led the other family members in figuring out how to use the robot, and the mother remarked that he was the person most excited with the robot. Once the robot started moving they constantly made compliments on how smart it was, except for the younger daughter who showed little interest in the device. Finally, in family KD the parents quickly figured out how to operate the robot, ran it for a while to see if it could go over floor mats, and mentioned that it was better than they had expected. The elder daughter did not want to participate in this study, nor did she seem interested in the robot.

Figure 9. Families KB (left) and PA (right) receiving the robots.
Exploration: Experimenting and Playing
This stage occurred in between visits. We were informed of the families’ activities through a shared group in BAND and Facebook Groups. During this period (approximately two weeks), family KA uploaded several videos and images showing the children playing with the robot, making it push other toys and building paths for Kobot (the robot’s name) to go through (see Figure 10). Family KB also uploaded images of interesting events that occurred with the robot such as it vacuuming socks on the floor and even one boy’s fallen tooth. Family PC performed in a similar way, and commented on how helpful it was for cleaning. Family KD also posted images of the places where the robot had difficulties moving, and so forth. This was the only family that did not think the reason for these difficulties could be due to incorrect use of the device.

Figure 10. Family KA during the exploration stage; the robot has a sticker with its name in Korean.
Learning and Adaptation: Learning Affordances
At approximately three weeks after the families received the robots, we conducted our third visit. We noticed that the initial excitement had almost disappeared (see Figure 11) and the families started to talk about the elements that could be improved in the robot, and what methods they used to cope with its limitations. Family KA’s mother uploaded an image showing how she moved furniture from the floor so that the robot could transit more easily. Families KB and KC talked about their process of moving to a different apartment; they used the robot to help with cleaning, and then carried it separately from the other household items. Interestingly, family PC’s parents talked about how much cleaner their home had become, and that they had not realized it at first until they observed the amount of dust collected in the robot’s bin. Since family KD had not had high expectations of the robot, they did not suffer from the trough of disillusionment stage, where users usually realize the actual system’s limitations and search for ways to overcome this issue (learn and adapt).

Figure 11. Coping with the robot’s limitations; the caption in the image on the left reads “returning to charge.”
Habituation: Routine Practice and Maintenance
We visited the families again (visit four) one month after the last visit, and again after two months (visit five). During this period, we could observe how the families started building their routines and how these evolved over time. Once the families had figured out the way to use the robot that worked best for them, they would replicate those procedures until they became natural. Up to this point, families had started to habituate to the robot, and all the children finally stopped playing with it. They also moved its charging dock to a less visible place and made comments on things that could be improved, such as additional customization options and upgradeable software. Differently from the fourth visit, in the fifth visit the families appeared concrete in their opinions towards the robot. Almost all of them agreed that it was helpful and they wanted to keep using it, and would buy a new one if it were to break down. The one exception was family KA, the family that had had the highest emotional attachment. This family now decided that they would rather go back to the traditional vacuum cleaners; the reason for this seemed to be the high initial expectations that could not be matched after the novelty effect disappeared, added to their moving house at a time when they were somewhat disappointed with the robot, which increased this negative feeling, and finally the fact that the mother’s pregnancy increased her cleanliness standards far over the capabilities of Powerbot.
Decision of Retention: Crossing the Chasm
At our last visit (six months after the families received the robot), we asked them if they still had the same opinions about the robot as they had had at the previous visit. Family KA’s mother told us that after reconsidering, they had decided to keep using the robot. Additionally, all families reflected on the differences in the weather at the beginning and the end of the study, mentioning that they used Powerbot more often in summer than in winter because of a series of factors such as hot and humid weather or the use of floor mats in winter. As a result of this, they could tell that during summer their houses were cleaner, which denotes an increase in their cleanliness standards.
Elements Strongly Influencing Adaptation
We extracted those concepts that had significant relevance for the outcomes of the adaptation patterns and were manifested at different levels of the sample (among countries, families, and family members). In other words, they marked noticeable differences between countries and among families, but also influenced the distinctive attitudes among the family members.
Contextual Novelty
This refers to the general knowledge that people, families, or populations have about new technology. At first it became evident that there was a difference in the contextual novelty of Powerbot between the two countries, which enabled the Korean families to attach individual meanings to the robot, while the Peruvian families were limited to general definitions. However, manifestations of this contextual novelty also appeared among the families and family members. Among the Korean families, the family that possessed the most knowledge about the device (family KD) had a particular adaptation pattern that skipped entirely the initial peak of inflated expectations. In a similar manner, among the individual family members, those who had more knowledge about the robot tended to engage more rationally with it, as they knew how the machine operates. As an example of this, participant PA-3 from the Peruvian families, who was studying mechatronic engineering, mentioned that he would just dismantle the robot once it was no longer useful, to reuse its components.
User Standards
These are based on Norman’s (2004) behavioral, visceral, and reflective dimensions of interaction with objects, from which the functional, aesthetic, and reflective standards were respectively formulated. The most salient in this study was the functional standard, in the form of cleaning standards, referring to users’ expectations for the quality of cleaning the robot has to achieve in order to be acceptable. The elements influencing this standard were the main user’s cleaning habits, the physical environment (use of carpets, mats, stairs, the material of the floor), customs (wearing shoes inside the house or not), the season (summer days against winter or rainy days), and finally the presence of pets (due to their fur). Some families’ concern over aesthetic standards could also be observed: some families moved the charging dock of the robot under the sofa or to other more discreet locations in the house as its aesthetics did not match those of the rest of the house. Finally, in the area of reflective standards, innovation standards appeared, as many participants (particularly in the Peruvian families) gave value to the robot’s “cool factor” thanks to its high contextual novelty, and extended that value to themselves for having such an innovative device, while other participants were not highly motivated by the robot’s innovative value, mainly due to their product-related background knowledge or professional field.
User Profiles
Family profiles were formulated in this study based on a series of contextual variables: the family composition (number of members, ages, backgrounds) the family’s general background knowledge regarding the product, their expectations about it, their motivations for acquiring it, and the aforementioned contextual novelty and user standards. The conjunction of these elements defined the profiles of the families, which were manifested in the empirical data as their attitudes towards the robot (i.e., how the families treated the robot, what they considered the robot to be). Despite the small sample size, five distinct attitudes could be identified in this study: thinking of the robot as a pet, helper, toy, cool technology, and home appliance. Hence, the respective family profiles identified are:
- Emotionally driven families: Based on family KA, whose approach to the robot vacuum cleaner was mainly emotional. Their motivation for getting the robot vacuum cleaner was driven by the children’s desire to have a pet, and thus their initial attitude towards PowerBot was to treat it as a pet. They also immediately named it “Kobot” and made some customizations to its appearance. However, the robot’s cognitive capabilities did not meet their expectations in the long run, as it was not meant to perform as a pet. Eventually the family lost interest in it due to the disappointment.
- Families with fitted needs: The clearest example was family KC, which had a member with physical limitations and another one of elder age who constantly visited them. This situation nuanced the family members’ perceptions of the robot, so that they thought of it as a helper, usually making comments about how thankful they felt and generally presenting a positive evaluation of its performance.
- Entertainment-driven families: Based on the families with young children (particularly family KB) whose acquisition of the robot vacuum cleaner was motivated by their strong excitement with the idea. The general expectation among parents was to have an interesting device that could serve the purpose of cleaning as well as being a toy for the children. However, this only lasted until the learning and adaptation stage (approximately two months) as the children lost interest in the robot and it passed to being used mainly by the parents for cleaning.
- Innovation-driven families: Among most of the Peruvian families (particularly family PB), a common attitude towards the robot was that it was a cool technology, which caused the average peak of inflated expectations to be considerably higher than among the Korean families. This was due partly to a feeling of uniqueness and exclusivity for having a product not yet in the local market. This attitude might be the most commonly expected scenario when introducing a new technology in places where its contextual novelty is significantly high and it has had previous proven success in other populations.
- Pragmatically driven families: Based on family KD in Korea, whose approach to the robot vacuum cleaner was clearly functionalistic. They had extensive knowledge about the type of technology used in this type of product due to the engineering background of both parents, and thus they perceived the robot merely as a home appliance. Their initial expectations were actually far lower than those of the rest of the families in the study. Yet, they were one of the families that presented the smoothest improvements over time.
These results are encouraging considering the high probability of finding additional attitudes in bigger participant samples, and thus expanding the number of identified family profiles.
Adaptation Profiles Framework (APF)
Adaptation profiles refers to adaptation in context. It addresses the relationship between the contextual variables defining the users and the product, and the resulting adaptation pattern.
The adaptation profiles framework (APF, see Figure 12) was developed based on the technology acceptance model (TAM), the hype cycle, the technology adoption cycle, and the domestic robot ecology (DRE), in combination with ethnographical interpretation, behavioral analysis and Glaserian grounded theory; it describes the transition from user profiles to adaptation patterns. Its elements are 1) contextual variables (comprising word-of-mouth references, media, background knowledge, family composition, social norms, contextual novelty, and user standards), which influence the 2) expectations regarding the system (perceived usefulness, and ease of use), and the 3) motivations for using it. These elements together translate into the 4) user profiles (termed family profiles in this case study). This conceptual construct feeds into the 5) user attitudes towards using the system at the adoption stage. During the exploration stage, these attitudes are reflected in the 6) behavioral intention of use, which can manifest itself in the form of intensive play, or exploration of the robot’s intelligence, sensors, physical capabilities, and so on. Then as we enter the learning and adaptation stage, the initial novelty factor has almost disappeared, to give way to the period known in the hype cycle as the trough of disillusionment, where users face the reality of the 7) system limitations, which in most cases for first-time users will create a direct conflict with their prior behavioral intentions of use. During this intention of use versus system limitations trade-off, users assess how much they are willing to give in order to adapt to the system. As a result of these iterations, users define their 8) actual system use and, if they are satisfied enough with the result, they will perform these activities repeatedly until they set clear 9) routines and defined use patterns during the habituation stage. Finally, at the future retention stage, users that were not convinced enough by the system during the habituation stage can then reach a decision as to whether or not it is worthwhile to continue using it, expressed as the 10) desire for retention, which extends not only to the particular device being used at that moment but also to the acceptance of future devices that claim to offer a similar experience.
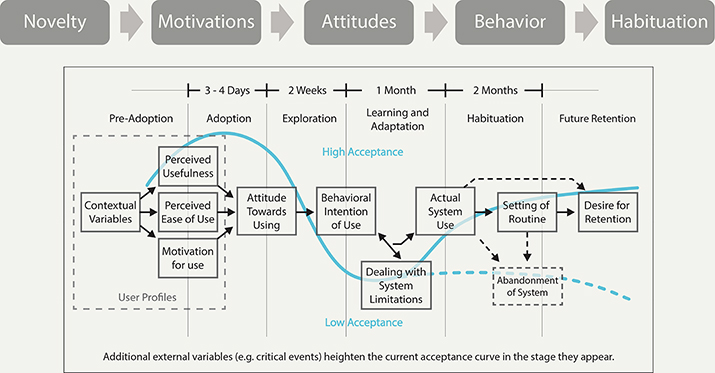
Figure 12. Adaptation profiles framework (APF).
The adaptation profiles framework thus presents the elements to be taken into consideration in order to build user profiles for adaptation, named here adaptation profiles, which describe the type of adaptation pattern that will result from a particular user profile and product.
Identifying Adaptation Profiles (AP)
From the five family profiles identified in the User Profiles section, we developed five adaptation profiles. These profiles express the adaptation patterns that can be expected, based on the product’s and the users’ contextual characteristics.
Emotionally Driven Adaptation Profile
For users who attach particular importance to the emotional value that an interactive product or robotic product can provide. In this case the adaptation pattern can be one of extremes. These users have high expectations, usually trust the media, and are prone to commitment. During the exploration stage, these users engage with the product in a variety of activities: creative experimentation, play, and customization. However, if the product does not satisfy their expectations after entering the learning and adaptation stage, it becomes hard for them to recover their interest, with risk of ceasing use. When targeting these users, it is recommended not to overinflate the expectations of the product in the media, as it then becomes difficult for them to recover from the trough of disillusionment (see Figure 13).
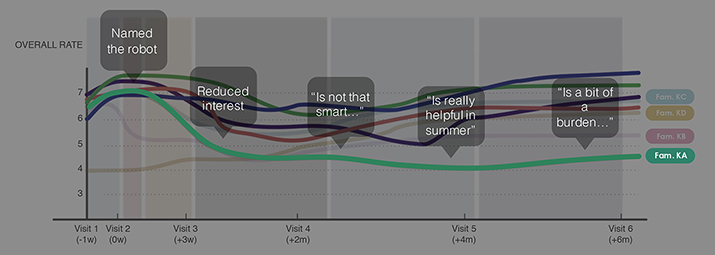
Figure 13. Emotionally driven adaptation pattern.
Adaptation Profile for Fitted Needs
For users whose particular needs match the capabilities of the new technology. These users generally perform positively over the adaptation process and experience feelings of gratitude and relief thanks to the satisfactory match with their needs. They develop a conventional adaptation pattern, showing an expected peak of inflated expectations at the early stages, and their experimentation is usually focused on improving their use of the device. Once they enter the trough of disillusionment (after approximately one month) their perception of the product is still positive, but they start looking for additional hardware or software upgrades that they could add to the product. Finally, during the habituation stage, they develop constant, efficient routines. This type of user has good advice for developers on how to improve the product in functional matters (see Figure 14).
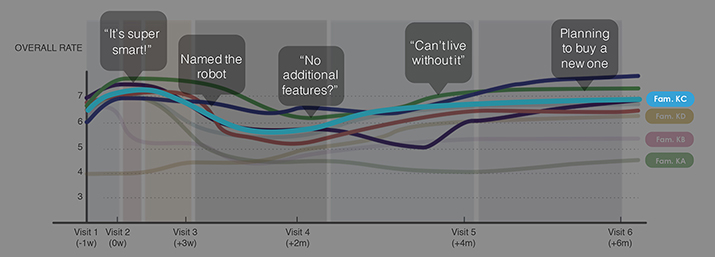
Figure 14. Adaptation pattern for fitted needs.
Entertainment-Driven Adaptation Profile
For users who attach particular importance to the amusement and entertainment value a product can provide. If the product was not designed with entertainment in mind, but still has interactive qualities that create entertainment, these users may consider this an extra value with their young children in mind. However, this attribute will not last long after the exploration period has ended (approximately two to three weeks) as children change their interests quickly. The product will then pass to being used by the main user for the purpose it was designed for. If the product was designed for entertainment, the adaptation could follow a similar pattern to that of the adaptation profile for fitted needs, depending on the product’s success in providing entertainment (see Figure 15)
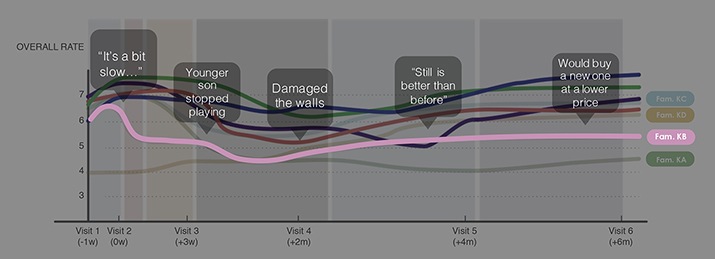
Figure 15. Entertainment-driven adaptation pattern.
Innovation-Driven Adaptation Profile
For users who have an explicit interest in technology. These users’ background knowledge on technology is broad and they are eager to try new products; however, they are also critical about the products’ performance. Their exploration stage is especially long (more than one month), and they engage in all sorts of experimentation, which could include disassembling the product. Their trough of disillusionment is not strong as their motivation for acquiring the product was the product itself rather than its supplying a particular need, and by the habituation stage they are generally satisfied with the experience although their frequency of use declines significantly (see Figure 16).
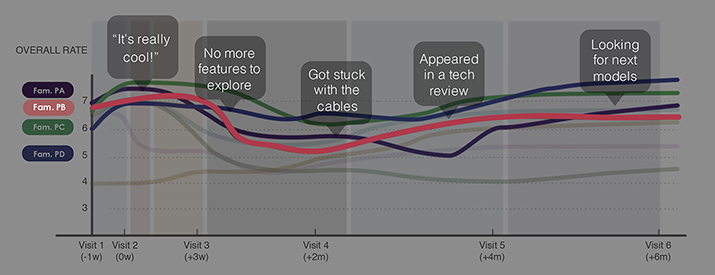
Figure 16. Innovation-driven adaptation pattern.
Pragmatically Driven Adaptation Profile
For users who seek products that represent a clear improvement to the current state of the art. These users are fairly knowledgeable about technologies, fast learners, and highly skeptical as they will only acquire a new technology if they think it can improve their current lifestyles in a pragmatic sense, helping them to save time or to do things with greater ease. At the beginning of their adaptation patterns, they start with lower expectations than the average user; however, if the product proves to be functional in its main task, they will not experience any trough of disillusionment, but rather their acceptance of the product will increase over time until reaching habituation (see Figure 17).
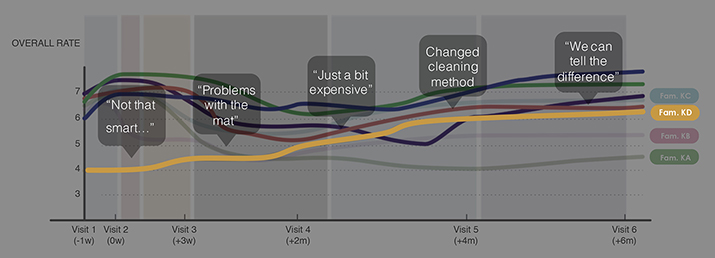
Figure 17. Pragmatically driven adaptation pattern.
Sociocultural Differences
This being a study that involves two considerably different countries, some sociocultural differences between them presented interesting implications for the families’ attitudes and behaviors towards the robot. We have attempted to rationalize and categorize these implications by employing van Boeijen’s (2015) sociocultural dimensions.
- Attitude: Peruvian participants did not consider the robot to be “part” of the family, nor did they attribute any animistic values or agency to the device (e.g., give it a name). Instead, Peruvian families valued Powerbot as a technological artifact, valuable due to its technological advancement. By contrast, the majority of the Korean families (KA, KB, and KC) did treat the robot as having agency or social presence, calling it by its given name, and often referring to it as if it had a mind of its own (e.g., talking to the robot, thanking it).
- Identification: Peruvians’ individualistic approach to self-identification meant that family members did not necessarily build their identities based on their social duties or roles. This was reflected in the fact that many of the Peruvian participants thought of cleaning activity as a mere duty, with no added value apart from its functional purpose. Conversely, the Koreans’ collective approach to the building of identity was reflected in the fact that the Korean participants tended to consider cleaning activity as having a dignifying value for the one doing it, in relation to the social roles and hierarchies of the family members. This functional–relational duality was also reflected in the valuations and constructions of meaning given to the robot, from a merely achievement-oriented “functional device” (Peruvians) to a care-oriented “relational social actor” (Koreans).
- Roles: Powerbot’s “Point Cleaning” feature and general ease of use made it accessible for any family member to perform cleaning activities. Among the Peruvian families, this characteristic translated into an increase in the division of cleaning roles among the family members, a characteristic that persisted over time. However, among the Korean families, despite an initial apparent division of the activities involving the robot, over time the mothers emerged as the most common users, reflecting differences in social dynamics affecting the division of roles in the household.
- Space: The Korean home is considered a highly private space, while the preferred locations for social encounters are public spaces such as coffee shops. By contrast, the Peruvian home is considered an ideal space for socialization, where regular social encounters with relatives and friends take place, in which demonstrations of Powerbot’s capabilities as well as funny anecdotes with it are shared with the guests. Thus the hype and novelty factors of the robot are extended.
Conclusion
Currently, adaptation is widely understood as a phenomenon with generally fixed characteristics. In this study, through a detailed analysis of the adaptation process, an empirical and theoretical basis could be found for explaining how the characteristics of both the users and the product can generate different attitudes towards adaptation, which in turn generate different adaptation profiles.
Researchers and designers working with new technologies can employ the adaptation profiles framework (APF) to (1) understand how the differences in adaptation patterns occur, and (2) determine the possible adaptation patterns for their target participants/users, using the adaptation profiles developed from this case study as a guide or starting point. Given the variety of contextualities (e.g., focusing on couples or older users instead of families), or by merely employing a larger sample size, the likelihood of finding additional adaptation profiles appears to be high, considering that this study yielded five adaptation profiles from a relatively small sample size.
With regard to how designers can improve the adaptation experiences with their products, adaptation profiles can provide an image of the possible predisposition or attitude the target user could have for adapting to the product based on his or her profile. This information can be useful in order to take the right decisions on whether and when to launch an update, how to promote the product, or which features to focus on, to mention some examples. Additionally, contextual novelty can be used to define how novel the product or technology actually is, by considering the historical development of such technology within the target population, the information provided about the technology in popular media, and the background knowledge of the target users. This is also a useful way of determining how difficult it may be for our intended users to adapt to our product, and thus stay within Loewy’s (1951) “most advanced, yet acceptable” range. Finally, the user standards tool helps designers to build an image of the expectations users will have of the product from a functional, aesthetic and reflective vantage point.
From a broader perspective, these tools are expected to raise awareness of the value and richness of treating user experience as a flexible quality that varies over time, as opposed to understanding it as a specific, static quality; this is comparable to the difference between watching a video and looking at a picture. Along these lines, further work could be done to explore additional benefits of designing with adaptation in mind, from which new design methodologies could be built.
Acknowledgments
We thank all of our participants for sharing their experiences with us, and also thank Samsung Electronics for their kind donation of the Powerbot vacuum cleaners to support the implementation of the study without imposing any conditions whatsoever on the study design; Samsung’s domestic appliance design team for their valuable feedback and comments on how the final results of this study could be useful for designers; and the review board for their useful and constructive comments on the elaboration of this article.
References
- Ajzen, I., & Fishbein, M. (1980). Understanding attitudes and predicting social behavior. Englewood Cliffs, NJ: Prentice-Hall.
- Ballve, M. (2014, June 5). The market for home cleaning robots is already surprisingly big, and there is plenty of room for growth. Business Insider. Retrieved from http://www.businessinsider.com/the-surprisingly-big-home-robot-industry-2014-6
- Bartneck, C., Nomura, T., Kanda, T., Suzuki, T., & Kensuke, K. (2005). Cultural differences in attitudes towards robots. In Proceedings of the Symposium on Robot Companions: Hard Problems and Open Challenges in Robot-Human Interaction. [Part of the proceedings of the AISB’05 Convention, Hatfield, UK.] Retrieved from http://www.aisb.org.uk/publications/proceedings/aisb2005/5_RoboComp.pdf
- Bates, D., & Plog, F. (1990). Human adaptive strategies. New York, NY: McGraw-Hill.
- Bauwens, V., & Fink, J. (2012). Will your household adopt your new robot? Interactions, 19(2), 60-64. doi:10.1145/2090150.2090165
- Beal, G. M., Rogers, E. M., & Bohlen, J. M. (1957). Validity of the concept of stages in the adoption process. Rural Sociology, 22(2), 166-168.
- Boas, F. (1911) The mind of primitive man. New York, NY: Macmillan.
- Bouton, M. E. (2007). Learning and behavior: A contemporary synthesis. Sunderland, MA: Sinauer Associates.
- Breazeal, C. L. (2002). Designing sociable robots. Cambridge, MA: MIT Press.
- Brooks, R. (2008). The next 50 years. Communications of the ACM, 51(1), 63-64. doi:10.1145/2696454.2696472
- Chang, W.-L., & Šabanović, S. (2015). Interaction expands function: Social shaping of the therapeutic robot PARO in a nursing home. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (pp. 343-350). New York, NY: ACM. doi:10.1145/2696454.2696472
- Choi, W., Dobbs, R., Suh, D., Mischke, J., Chon, E., Cho, H., … Kim, H. (2013). Beyond Korean style: Shaping a new growth formula. Seoul, South Korea: McKinsey Global Institute.
- Cowan, R. S. (1983). More work for mother: The ironies of household technology from the open hearth to the microwave. New York, NY: Basic Books.
- Davis, F. D., Bagozzi, R. P., & Warshaw, P. R. (1989). User acceptance of computer technology: A comparison of two theoretical models. Management Science, 35(8), 982-1003.
- Domjan, M. P. (2014). The principles of learning and behavior. Boston, MA: Cengage Learning.
- Duffy, B. R. (2003). Anthropomorphism and the social robot. Robotics and Autonomous Systems, 42(3-4), 177-190. doi:10.1016/S0921-8890(02)00374-3
- Fenn, J. (1995). When to leap on the hype cycle. Stamford, CT: Gartner.
- Fink, J., Bauwens, V., Kaplan, F., & Dillenbourg, P. (2013). Living with a vacuum cleaning robot: A 6-month ethnographic study. International Journal of Social Robotics, 5(3), 389-408. doi:10.1007/s12369-013-0190-2
- Fink, J., Bauwens, V., Mubin, O., Kaplan, F., & Dillenbourg, P. (2011). People’s perception of domestic service robots: Same household, same opinion? In Proceedings of the 3rd International Conference on Social Robotics (pp. 204-213). Berlin, Germany: Springer.
- Forlizzi, J. (2007). How robotic products become social products: An ethnographic study of robotic products in the home. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (pp. 129-136). New York, NY: ACM. doi:10.1145/1228716.1228734
- Forlizzi, J., & Disalvo, C. (2006). Service robots in the domestic environment: A study of the Roomba vacuum in the home. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction (pp. 258-265). New York, NY: ACM. doi:10.1145/1121241.1121286
- Friedman, B., Hall, M. G., Kahn, P. H., & Hagman, J. (2003). Hardware companions? What online AIBO discussion forums reveal about the human-robotic relationship. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (pp. 273-280). New York, NY: ACM. doi:10.1145/642611.642660
- Geraci, R. M. (2006). Spiritual robots: Religion and our scientific view of the natural world. Theology and Science, 4(3), 229-246.
- Gockley, R., Forlizzi, J., & Simmons, R. (2006). Interactions with a moody robot. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction (pp. 168-193). New York, NY: ACM. doi:10.1145/1121241.1121274
- Hofstede, G. H., & Hofstede, G. J. (2005). Cultures and organizations: Software of the mind (2nd ed.). New York, NY: McGraw-Hill.
- Huttenrauch, H., & Eklundh, K. S. (2002). Fetch-and-carry with CERO: Observations from a long-term user study with a service robot. In Proceedings of the 11th International Symposium on Robot and Human Interactive Communication (pp. 158-163). Piscataway, NJ: IEEE.
- Kanda, T., Sato, R., Saiwaki, N., & Ishiguro, H. (2007). A two-month field trial in an elementary school for long-term human-robot interaction. IEEE Transactions on Robotics, 23(5), 952-971.
- Kaplan, F. (2004). Who is afraid of the humanoid? Investigating cultural differences in the acceptance of robots. International Journal of Humanoid Robotics, 1(3), 465-480.
- Kaul, A. (2015, November 4). A new kind of family robot is launched in China. Tractica. Retrieved December 16, 2016, from https://www.tractica.com/automation-robotics/a-new-kind-of-family-robot-is-launched-in-china/
- Kim, H., Lee, H., Chung, S., & Kim, C. (2007). User-centered approach to path planning of cleaning robots: Analyzing user’s cleaning behavior. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (pp. 373-380). New York, NY: ACM. doi:10.1145/1228716.1228766
- Kim, M., Oh, K., Choi, J., Jung, J., & Kim, Y. (2011). User-centered HRI: HRI research methodology for designers. In Y. Wang (Ed.), Mixed Reality and Human-Robot Interaction (pp. 13-33). Dortrecht, Netherlands: Springer. doi:10.1007/978-94-007-0582-1_2
- Koskinen, I., Binder, T., & Redström, J. (2008). Lab, field, gallery and beyond. Artifact: Journal of Virtual Design, 2(1), 46-57.
- Kubo, A. (2013). Plastic comparison: The case of engineering and living with pet-type robots in Japan. East Asian Science, Technology and Society: An International Journal, 7(2), 205-220. doi:10.1215/18752160-2145117
- Lee, H. R., & Šabanović, S. (2014). Culturally variable preferences for robot design and use in South Korea, Turkey, and the United States. In Proceedings of the 2014 ACM/IEEE International Conference on Human-Robot Interaction (pp. 17-24). New York, NY: ACM. doi:10.1145/2559636.2559676
- Lee, H. R., Sung, J. Y., Šabanović, S., & Han, J. (2012). Cultural design of domestic robots: A study of user expectations in Korea and the United States. In 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. (pp. 803-808). Piscataway, NJ: IEEE. doi:10.1109/ROMAN.2012.6343850
- Leite, I., Martinho, C., Pereira, A., & Paiva, A. (2009). As time goes by: Long-term evaluation of social presence in robotic companions. In RO-MAN 2009 - The 18th IEEE International Symposium on Robot and Human Interactive Communication (pp. 669-674). Piscataway, NJ: IEEE. doi:10.1109/ROMAN.2009.5326256
- Loewy, R. (1951). Never leave well enough alone. New York, NY: Simon and Schuster.
- Lovgren, S. (2006, September 6). A robot in every home by 2020, South Korea says. National Geographic News. Retrieved from http://news.nationalgeographic.com/news/2006/09/060906-robots.html
- MacDorman, K., Vasudevan, S., & Ho, C. C. (2009). Does Japan really have robot mania? Comparing attitudes by implicit and explicit measures. AI & Society, 23(4), 485-510.
- Melson, G. F., Kahn, P. H., Jr., Beck, A. M., Friedman, B., Roberts, T., & Garrett, E. (2005). Robots as dogs? Children’s interactions with the robotic dog AIBO and a live Australian shepherd. In CHI ’05 Extended Abstracts on Human Factors in Computing Systems (pp. 1649-1652). New York, NY: ACM. doi:10.1145/1056808.1056988
- Moore, G. A. (1991). Crossing the chasm. New York, NY: HarperBusiness.
- Mutlu, B., & Forlizzi, J. (2008). Robots in organizations: The role of workflow, social, and environmental factors in human-robot interaction. In Proceedings of the 3rd ACM/IEEE International Conference on Human-Robot Interaction (pp. 287-294). New York, NY: ACM. doi:10.1145/1349822.1349860
- National Academy of Engineering. (2016). Household appliances timeline. Retrieved December 7, 2016, from http://www.greatachievements.org/?id=3768
- Norman, D. A. (2004). Emotional design: Why we love (or hate) everyday things. New York, NY: Basic Books.
- Odom, W., Sellen, A., Banks, R., Kirk, D., Regan, T., Selby, M., … Zimmerman, J. (2014). Designing for slowness, anticipation and re-visitation: A long term field study of the Photobox. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (pp. 1961-1970). New York, NY: ACM. doi:10.1145/2556288.2557178
- Pacchierotti, E., Christensen, H. I., & Jensfelt, P. (2006). Design of an office-guide robot for social interaction studies. In 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 4965-4970). Piscataway, NJ: IEEE. doi:10.1109/IROS.2006.282519
- Piaget, J. (1952). The origins of intelligence in children. (M. Cook, Trans.) New York, NY: International Universities Press. (Original work published 1936)
- P&S Market Research. (2016, April 13). Global personal robot market to witness 37.8% CAGR 2016-2022. PR Newswire. Retrieved December 7, 2016, from http://www.prnewswire.com/news-releases/global-personal-robot-market-to-witness-378-cagr-during-2016---2022-ps-market-research-575539621.html
- Robertson, J. (2014). Human rights vs. robot rights: Forecasts from Japan. Critical Asian Studies, 46(4), 571-598. doi:10.1080/14672715.2014.960707
- Šabanović, S., Reeder, S., Kechavarzi, B., & Zimmerman, Z. (2011). Designing a robot through prototyping in the wild. In Proceedings of the 6th International Conference on Human-Robot Interaction (pp. 239-240). New York, NY: ACM. doi:10.1145/1957656.1957750
- Šabanović, S., Bennett, C. C., & Lee, H. R. (2014, March 3). Towards culturally robust robots: A critical social perspective on robotics and culture. Paper presented at the Culture-Aware Robotics Workshop at the ACM/IEEE International Conference on Human-Robot Interaction, Bielefeld, Germany.
- Sander, A., & Wolfgang, M. (2014, August 27). The rise of robotics. BCG Perspectives. Retrieved December 7, 2016, from https://www.bcgperspectives.com/content/articles/business_unit_strategy_innovation_rise_of_robotics/
- Silverstone, R., & Hirsch, E. (2005). Consuming technologies: Media and information in domestic spaces. London, UK: Routledge.
- Sung, J. Y. (2011). Towards the human-centered design of everyday robots (Doctoral thesis, Georgia Institute of Technology). URI: http://hdl.handle.net/1853/39539
- Sung, J. Y., Christensen, H. I., & Grinter, R. E. (2009). Robots in the wild: Understanding long-term use. In Proceedings of the 4th ACM/IEEE International Conference on Human-Robot Interaction (pp. 45-52). New York, NY: ACM. doi:10.1145/1514095.1514106
- Sung, J. Y., Grinter, R. E., & Christensen, H. I. (2010). Domestic robot ecology. International Journal of Social Robotics, 2(4), 417-429. doi:10.1007/s12369-010-0065-8
- Sung, J. Y., Grinter, R., Christensen, H., & Guo, L. (2008). Housewives or technophiles? Understanding domestic robot owners. In Proceedings of the 3rd ACM/IEEE International Conference on Human Robot Interaction (pp. 129-136). New York, NY: ACM. doi:10.1145/1349822.1349840
- Sung, J. Y., Guo, L., Grinter, R. E., & Christensen, H. I. (2007). “My Roomba is Rambo”: Intimate home appliances. In J. Krumm, G. D. Abowd, A. Seneviratne, & T. Strang (Eds.) UbiComp 2007: Ubiquitous Computing (pp. 145-162). Berlin, Germany: Springer. doi:10.1007/978-3-540-74853-3_9
- Tobe, F. (2015, December 13). 2016 will be a pivotal year for social robots. The Robot Report. Retrieved December 15, 2016, from https://www.therobotreport.com/news/2016-will-be-a-big-year-for-social-robots
- Van Boeijen, A. (2015). Crossing cultural chasms: Towards a culture-conscious approach to design. Delft, Netherlands: TU Delft.
- Venkatesh, A., Kruse, E., & Shih, E. (2003). The networked home: An analysis of current developents and future trends. Cognition, Technology & Work, 5(1), 23-32.
- Von der Pütten, A. M., Krämer, N. C., & Eimler, S. C. (2011). Living with a robot companion: Empirical study on the interaction with an artificial health advisor. In Proceedings of the 13th International Conference on Multimodal Interfaces (pp. 327-334). New York, NY: ACM. doi:10.1145/2070481.2070544
- Wadsworth, B. J. (2004). Piaget’s theory of cognitive and affective development: Foundations of constructivism. New York, NY: Longman.
- Weng, Y., Chen, C., & Sun, C. (2009). Toward the human–robot co-existence society: On safety intelligence for next generation robots. International Journal of Social Robotics, 1, 267-282.
- Young, J., Hawkins, R., Sharlin, E., & Igarashi, T. (2009). Toward acceptable domestic robots: Applying insights from social psychology. International Journal of Social Robotics 1(1), 95-108. doi:10.1007/s12369-008-0006-y
