
“It's So Touching”: Emotional Value in Distal Contact
UTC / COSTECH, Compiègne, France
How can interpersonal « contacts » allow for a « touching » relationship at a distance? To answer this question, we try to understand the reasons for the pre-eminence of the tactile modality in descriptions of emotional exchanges. With the help of an original experimental setup, we will propose a description of the essential conditions for “contact” mediated by technical devices. Next, in order to understand the relationship between such contact and emotional values, we will construe emotion as being the product of a force that instigates movement. We will then show that the “force” which is transmitted in touching contacts is based in the duality of the perceiving body and the body image. The fact that the subject is ignorant of his own body-image is revealed by the breaking of perceptual symmetry on the occasion of a touching encounter. These results provide some guiding principles for the design of interfaces and structures of interaction that allow for emotional contacts across networks.
Keywords – Contact, Emotion, Perceptual Crossing, Touch, Interaction Design.
Relevance to Design Practice – The analysis of the structure and dynamics of touching relations make it possible to define guidelines for the design of interpersonal interactions via networks.
Citation: Lenay, C. (2010). “It’s so touching”: Emotional value in distal contact. International Journal of Design, 4(2), 15-25.
Received March 7, 2010; Accepted July 20, 2010; Published August 31, 2010.
Copyright: © 2010 Lenay. Copyright for this article is retained by the author, with first publication rights granted to the International Journal of Design. All journal content, except where otherwise noted, is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 2.5 License. By virtue of their appearance in this open-access journal, articles are free to use, with proper attribution, in educational and other non-commercial settings.
Corresponding Author: charles.lenay@utc.fr
Introduction
In this article we shall seek to delineate the general relational structure of contacts relationships which are touching, independently of any particular emotional contents that may be involved. Our hypothesis is that touch, both as a perceptual modality and as a modality of bodily interaction, can provide the general type of this relation; and that this is so even though “moving” interpersonal contacts can quite well occur without any physical contact.
In classical studies of emotion, whether they involve evolutionary, psychological or neuroscientific approaches, the question is treated in an essentially internal fashion (Cannon, 1928; Rolls, 1999; Prinz, 2003). According to this account, a situation or an event triggers an internal cognitive or neurophysiological process of rapid and possibly unconscious evaluation via sensory systems; this internal process then triggers a series of actions or dispositions to act, then an emotional experience, and finally ending up with specific facial expressions. In the study presented here, with the aim of delineating the basic structure of touching contact, we will rather focus our attention on emotional interactions, which will lead us to adopt a primarily externalist stance according to which emotion is first and foremost a question of bodily movements (James, 1884) and perceptual dispositions (Sartre, 1938). Thus, we shall not seek to propose a theory of solitary, individual emotions; rather, we shall try to understand how, and under what conditions, one can be touched by the signs left by another person, and how a form of emotional understanding can occur.
The following sequence of theoretical considerations will be based both on phenomenological descriptions and on some results from experimental psychology. For this, we will employ an original technical device that makes it possible to produce contact at a distance via digital network connections. Thus, this work aims at providing some guiding principles for the design of interfaces and structures of interaction that allow for emotional contacts at a distance (Deckers, Westerhoff, Pikaart, van Wanrooij, & Overbeeke, 2009).
That Which Is Touching
Definition
The word “touching” is used to designate something which touches a person’s sensitivity, which arouses sympathy, compassion, which provokes a feeling of moved compassion. A voice, an image, a face can be touching. One speaks of a story, of a letter, which are touching. “I am touched by your attention”. As often as not this emotional relation can be produced at a distance – by looks, by a telephone call – and thus in the absence of any direct bodily contact. Nevertheless, all these examples refer to the semantic field of touch as a perceptual function, and thus to contact with something which is tangible. Our guiding principle is that this metaphor is based on the fact that there is something functionally similar, a common structure of lived experience, between touching in the realm of the spirit and touching in the realm of the body. This conjunction of tactile and emotional terminologies is found in English and in many other languages, but we are not proposing here a linguistic study as to whether or not it is universal. It is quite sufficient for our purpose to establish that this use of “touch” is motivated, i.e. that in the history of the English language, speakers have found that these metaphorical relations are effective for expressing their emotions. It is this implicit knowledge, embedded in the language, which will serve us as a guide.
Touch
First of all, we shall recall the nature of the sense of touch from a purely bodily point of view. Touch corresponds to the physical contact of one thing with another. At the psycho-physiological level, the general feature is that the receptor field (a point or a surface) which provides the perception of the object coincides spatially with the object that is perceived. This contrasts with vision, where the point of view is distinct, at a distance from the perceived object.
The sense of touch (which can also be termed “haptic”) is an active perceptual modality, i.e. the contents of this experience are determined by the relations between exploratory movements and sensory feedback. From a functional point of view, it is useful to distinguish two aspects, according to the direction of the movement with respect to the object that is touched. We will call these aspects “tactile perception” and “kinesthetic interaction”.
- Tactile perception: the point of action (and of perception) is animated by a movement of tangential translation relative to the perceived object.
- Kinesthetic interaction: the point of action is animated by a movement or an effort which is basically orthogonal to the object. There is a resistance, a force-feedback from the object. In this way there can be perception of the weight or the inertia of the object. But there is not always a definite perception: the encounter with the object can directly transform the power to act: the obstruction, the constraint, can become a fulcrum, a new articulation. The resistance of the object makes it possible to grasp it, and thereby to transform our power of action.
Now what will interest us here is the contact between two individuals.
- Mutual tactile perception corresponds to the caress, i.e. a form of perceptual crossing in the course of which touching is reciprocal.
- Mutual kinesthetic interaction corresponds to a kinesthetic dialogue: shaking hands, dancing, cuddling …
But how is it that something which pertains to the most material sort of bodily interaction can serve as a matrix for thinking and speaking of emotions in the realm of the mind? What is the configuration that is common to the direct physical relation to things and other persons, and what seems to be the most immaterial and impalpable? A first intuition might be that what is in common is the figure of proximity. Relatively to sight or hearing, nothing can be closer to us than something that touches us. In the same way, that which is emotionally touching might well be that which attains our intimacy, which affects our most private sphere. But what exactly do we mean by “distance” and “proximity” on the level of an emotional relation? It is certainly not a physical proximity, as is indicated by the possibility of an emotional contact at a distance.
In order to bring clearly into focus the figure of touch that is relevant in the description of emotional relations, our key will paradoxically be precisely this situation of distal contact. The very possibility of “entering into contact” at a distance, using a technical interface, will allow us to bring out the important components of interpersonal contact, and in this way its links with the realm of emotions.
The situation of distal contact par excellence is catching one another’s eye. We know well how this situation is pregnant with emotional and social values (Argyle & Cook, 1976). The commonsense intuition is that what is perceived are not only the eyes and a body animated with definite movements, but above all a “look”, an intentional presence turned towards oneself. Now, how is it possible to recognize in the eyes of another person the specificity of a “look”? Understanding perceptual crossing should be the first clue towards grasping the meaning of this contact; and this may allow us subsequently to better understand the specificity of touching contact.
In order to give a precise empirical content to this question, we shall use a very simple system of prosthetic perception which provides a form of mutual touching at a distance. This will allow us to identify some sufficient conditions for the recognition of perceptual crossing in the adult. We will thus be able to show that this capacity can be explained directly at the perceptual level itself, and does not require invoking cognitive inferences or other high-level criteria for the attribution of intentionality. This experimental study has already been presented elsewhere (Auvray, Lenay, & Stewart, 2009), but it is important to detail it here and to explain it thoroughly since it will serve as the basis and the justification for the theoretical propositions that we will develop in subsequent sections.
Contact: The Constitution of a Meeting-Ground
Methods
The aim of these experiments is to study the perceptual interactions of two subjects by means of a minimalist technical device. With a view to a precise analysis of the joint dynamics, we have reduced the space of actions of the subjects to movements in a one-dimensional space, and their repertoire of sensations to a single all-or-nothing stimulus (just one bit of information at each moment).
The two subjects, in different rooms, are blindfolded and can only interact with each other by means of the device. With a computer mouse, each subject controls the movements of a receptor field of 4 pixels on a one-dimensional line. Only the horizontal movements of the mouse are taken into account. This space of action consists of a line of 600 pixels, with the two ends joined to form a topological torus in order to avoid the singularities at the end of the line. Several objects consisting of black pixels are situated on this line. Each time the receptor field overlaps with a black pixel, the subject receives an all-or-nothing tactile stimulus on the index finger of his free hand (Figure 1).
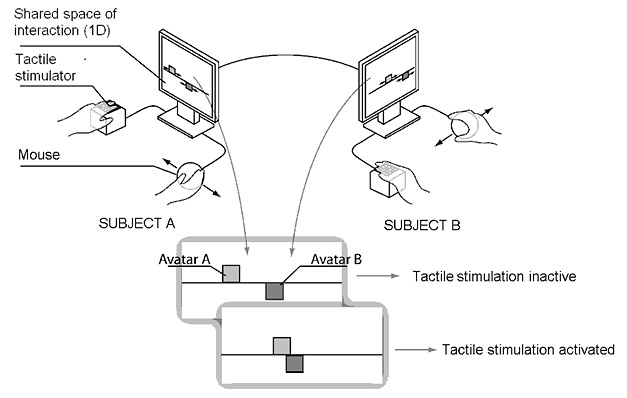
Figure 1. The one-dimensional space of perceptual interaction: with a computer mouse, each subject moves a receptor field on a line in a shared digital space. When the two receptor fields encounter each other, each user receives a tactile stimulus on his free hand.
Two devices of this type are connected via a network so that the two subjects share the same one-dimensional space. Each subject moves around in this space by means of horizontal displacements of his mouse. He can encounter three sorts of objects, each of which triggers an identical tactile stimulus:
A fixed object that we call the « fixed lure »: a segment 4 pixels wide.
The body-image of the other subject, which corresponds exactly to his receptor field (4 pixels wide). When the receptor field of subject A encounters the body-image of subject B, the receptor field of subject B necessarily encounters the body-image of subject A so that both subjects simultaneously receive a tactile stimulus. We call this situation “perceptual crossing”.
A moving object that we call the “mobile lure”. In order to ensure that this object has the same sort of movements as the body-image of the partner, we attached it by a rigid virtual link to this body-image at a distance of 50 pixels to the right (Figure 2). The mobile lure thus follows exactly the movements of the partner, at a constant distance. The difference with the body-image of the other subject is that when subject A encounters the mobile lure of subject B he receives a tactile stimulus, whereas subject B does not receive a stimulus.
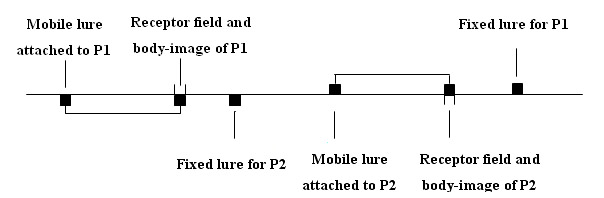
Figure 2. Schematic illustration of the one-dimensional space explored by the subjects: subject P1 receives a tactile stimulus whenever he encounters either his fixed object, or the receptor field of subject P2, or the mobile object attached to the receptor field of P2.
The question now is whether the subjects will be able to distinguish between the body-image of the partner and the mobile lure, even though they have exactly the same movements. The only difference is that the body-image of the partner is animated by a perceptual activity.
Ten pairs of subjects took part in this experiment (10 females and 10 males, mean age of 29.4 years). We explain to each participant the relation between the right-left movements of the computer mouse, the movements of the receptor field in a virtual line, and tactile stimulation. During a training phase of 3 minutes, the participants can discover the exploration of a fixed object and of two mobile objects (15 pixels per second et 30 pixels per second). The experimental task was explained to the participants; they were told that they could freely explore the one-dimensional space containing three types of tactile object: the partner’s avatar, fixed objects, and mobile objects. Obviously, we did not explain to them the functioning of the mobile lure and its relation to the receptor field of their partner. The instructions were to click with the left button of the mouse whenever they considered that they had encountered their partner. The evaluation lasted 15 minutes, with short breaks after each 5-minute session. During each session, the subjects could click as many times as they wished. There was no feedback as to whether their clicks were correct or not.
Results
Overall, for all the subjects and the different sessions, the majority of all the clicks are produced when the subjects are indeed in front of one another, i.e. in a situation of perceptual crossing (62%). We also observed a slight peak in the frequency distribution at a distance of 50 pixels, which corresponds to clicks on the mobile lure (Figure 3).
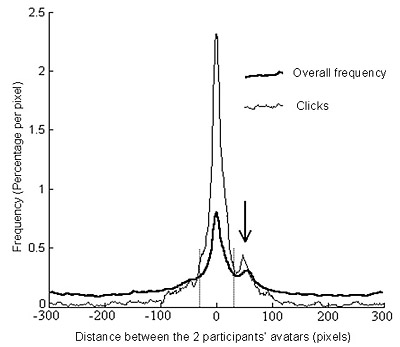
Figure 3. The frequency distributions of clicks as a function of the distance between the receptor fields of the pair of subjects: the thin line represents the total frequency of clicks: 62% of the distribution lies between ± 30 pixels. The thick line represents the total frequency of stimulations received by the subjects: only 28% of the distribution lies between ± 30 pixels. In both cases, there is a clear peak around the distance of 0 pixels, i.e. the situation of perceptual crossing, which shows that there is a dynamic attractor at this point.
What is recognized in the situation of perceptual crossing does indeed seem to be the activity of a perceiving subject, and not merely an objective type of movements, since the receptor field of the partner and the mobile lure are animated by exactly similar movements. However, the most interesting result of this study for our understanding of “contact” lies in the explanation of the strategies employed by the subjects in order to succeed in this task.
Analysis of Perceptual Crossing
First of all, if we look at the ratio between the clicks of the subjects and the stimulations received, it appears that the probability of clicking once a stimulation has been received is about the same whether the stimulation is due to an encounter with the mobile lure or with the body-image of the partner.
The reason that the subjects click more on the body-image of the partner is due to the fact that the joint perceptual trajectories of the subjects are such that there are many more stimuli due to encounters with the partner (52%) than with the mobile lure (15%) (Table 1). If the subjects succeed in the perceptual task, it is essentially because they succeed in situating themselves in front of one another, and not because they recognize any particular pattern in the sequence of stimulations that would enable them to distinguish the receptor field of their partner from the mobile lure. This capacity of the subjects to privilege the situation when they are in front of one another is quite easy to explain.
Table 1. Mean percentage (and standard deviation) of clicks, stimulation, and ratio between clicks and stimulation obtained for the 3 conditions of stimulation: Receptor field, mobile object and fixed object.

All the observations obtained with these minimalist devices show that the perception of an object in a definite position is accomplished by an active, reversible exploration of the object: subjects come and go around the singularity that provokes a sensory return (Sribunruangrit, Marque, Lenay, Gapenne & Vanhoutte, 2004). There is a rather general perceptual strategy, which consists of responding to a sensory event by “turning back”, i.e. reversing the movement of the receptor field.
If there is only one such singularity in the one-dimensional space of action, a regular symmetrical oscillation of the receptor field around this sensory event constitutes the perception of a fixed object. An asymmetrical oscillation around a stimulation that is constantly displaced in the same direction constitutes the perception of the uniform movement of an object. However, if the object moves faster than the subject can move in order to catch up with it in order to explore it, spatial constitution of the object becomes impossible.
One of the interesting features of our minimalist experimental situation lies here: if the other person is, like me, engaged in active perception, the movements of his body-image (and those of the mobile lure) are intrinsically too fast for me to determine a precise spatial location. If the subjects do succeed in responding more often to the presence of the body-image of their partner than to that of the mobile lure, it is because the two perceptual activities attract each other, just as in the visual domain two gazes attract each other. We can understand analytically that there is an attractor in the conjoint dynamics of the two subjects: to the extent that the basic perceptual strategy of each subject consists of inverting his movement following a sensory event, when he crosses his partner he will invert his trajectory and the partner will do the same. This is a sufficient condition for the two receptor fields to enter into a sort of “dance” (Figure 4). It is in this situation that the subjects most often click. It is the attractor of the perceptual crossing which explains the recognition of the Other, and not the inverse: it is because our looks attract each other that I recognize the presence of another intentionality (and not because I recognize an intentionality that our looks attract each other).
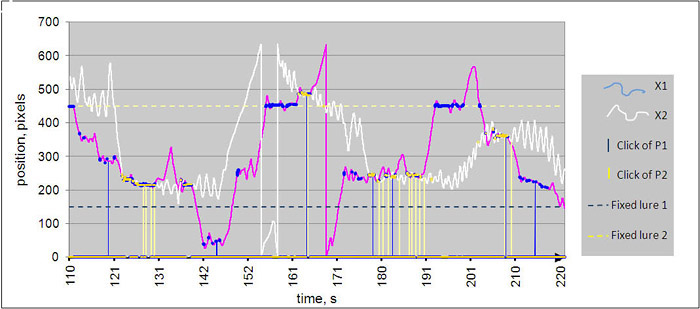
Figure 4. Perceptual trajectories in a one-dimensional space of perceptual interactions: The line is 600 pixels long, the ends being joined to form a torus. The blue trajectory (X1) corresponds to the movements of subject P1, and the white trajectory (X2) to subject P2. Time is on the abscissa, and the position on the one-dimensional line on the ordinate. The apparent jumps in trajectory correspond to the passage from one end of the torus to the other. The vertical segments correspond to clicks by P1 (blue) or P2 (yellow).
The attractor in the joint dynamics of the two perceptual trajectories makes mutual recognition possible because it satisfies, for each subject, the criteria that lead him to click. Thus, we observe that if the subject, engaged in his perceptual activity, encounters during the previous two seconds:
- a large number of stimulations, but for an object that he recognizes as fixed, his probability of clicking is low (the probability of clicking does not increase with the number of stimulations received);
- a small number of stimulations, there is no perception and the probability of clicking is again low;
- however, when the subject encounters a large number of stimulations even though the object remains spatially indeterminate, the probability of clicking is high. The probability of clicking on a moving object (avatar or mobile lure) increased with the number of stimuli experienced during two seconds: from 6% for 1 stimulus to 76% when 8 stimuli were received.
In the latter case, the subject is indeed most often in the presence of the other subject. Thus, the clicks of the subjects can be largely explained by the conjunction of two criteria, one negative and the other positive:
The “other person” is something that resists its spatial determination: it is neither a fixed object, nor an object obeying a movement that can be determined by a rule.
Nevertheless, the other person is something that maintains its presence. This is indeed characteristic of the body-image of an alter-ego but not of the mobile lure, because only that body-image corresponds to a receptor field that is sensitive to the presence of objects, i.e. is likely to change its behaviour according to the sensory inputs it receives. Now this sensitivity is related to a perceptual intentionality which continually aims at stabilizing itself around a singularity. This is precisely the sufficient condition which leads to the formation of an attractor in the joint dynamics, and which tends to increase the probability that the partner will be present.
Thus, the criteria which seem to be adopted by the subjects in order to click are not arbitrary, but follow logically from the encounter between two intentionalities which characterizes the perceptual crossing. They are coherent with the very content of that which is to be recognized: there would be an internal contradiction if the other person, as an intentional subject, could be determined as an objectively determined object. “One meets the other person, one does not constitute him” (Sartre, 1943, p. 299; our translation and italics). The other person is recognized precisely as that which resists any precise constitution, and which nevertheless persists in maintaining his presence.
The Space of the Encounter
Classically, phenomenological descriptions distinguish two very different aspects of the body of a subject:
- The lived-body (Leib). This is the body as experienced in a first-person perspective. It presents itself as my power to act and to feel. For me, it is essentially transparent.
- The body as an image (Körper). This is my body insofar as it is an object in space, which can be perceived by others.
In our experimental situation, the lived-body is the perceiving body represented by the receptor field. The body-image corresponds to a segment of 4 pixels which overlaps precisely with the receptor field, even though it is not itself perceived by that field.
At the beginning of the experiments, during the phase of learning, each subject constitutes his own perceptual space. He is isolated in a one-dimensional space where he perceives objects but where he does not perceive himself. In terms of the lived experience of each of the subjects: I can only encounter the other person in the form of a body-image. But, in order for the other person to appear to me as something more than a simple object in the world, it must also be sensitive to my presence. It is only in this way that the joint interpersonal dynamics of perceptual crossing can be established. When I become aware of the existence of a dynamics of this sort, I understand that I myself am an entity which is able to affect the sensitivity of the other person, even though I do not perceive myself directly as being an object or an image. Perceptual crossing reveals to me that I myself am something that can be touched, that I am also a body which has enough in common with the sensitivity of the other person. By the attention that he pays to me, the other person reveals to me that I have a body which affects him (Reddy, 2003). We discover that we share a common space of embodiment and action.
If we understand clearly how a subject can perceive the position and the movements of an object by scanning it through rapid, reversible movements that are faster than the object’s own movements, we can also understand by the same token that the determination of another person can only ever be partial – never quite complete, but never quite absent either. The other person flees from me just as much as he lets himself be grasped, and he flees me precisely to the extent that he tries to grasp me. To the extent that he escapes from me, I recognize the other person as a subject; to the extent that I can occasionally grasp him, I perceive a spatialized object. The perception of this duality is that of a “point of view”: a “point…” spatialized in the objective realm; “…of view” corresponding to the centre of a subjectivity animated by a perceptual intentionality.
These arguments are developed elsewhere in order to propose a new approach to the question of the recognition of another person as an intentional subject.1 Here, we only wish to use this experiment in order to discuss the relations between “contact” and something which is “touching”.
The Touching Relation
This analysis of perceptual interactions has allowed us to identify several essential components of what is involved in “contact”. But has this really enabled us to grasp how it is that a meeting of this sort can be “touching”, the bearer of emotional values? Of course, we may consider that the prime value of contact is the recognition of the presence of another person. But is that sufficient? It would seem that the answer is mitigated. A sign of this partial failure is that this analysis has been carried out using the vocabulary of vision (the meeting of “points of view”). Now, even though it is a case of distal contact, emotional touching does not use this vocabulary of vision. There is a specificity to “touch” which may serve us to advance in our enquiry concerning the emotional value of the contact involved in touching.
Emotional Encountering
On the plane of objective perception, the shared world which results from perceptual interactions is that of a common space of points of view. Now when one says “it is so touching”, one aims at designating a contact at another level. If something “touches” me, it is because it has something sufficiently in common with my own sensitivity to affect me; but this common world is different from that of objective space.
Theseus advances in the maze whilst Ariadne waits for him at the entry:
He would have left quite lost, and utterly hopeless of ever again walking in a straight path, if, every little while, he had not been conscious of a gentle twitch at the silken cord. Then he knew that the tender-hearted Ariadne was still holding the other end, and that she was fearing for him, and hoping for him, and giving him just as much of her sympathy as if she were close by his side. O, indeed, I can assure you, there was a vast deal of human sympathy running along that slender thread of silk! (Hawthorne, 1853/1999, p. 22).
An emotion appears to us as being « interior » and « deep » precisely because there is no constitution of determinate perceptual contents that one could place side by side, partes extra partes. And yet, as its etymology indicates, an e-motion is a sort of “putting in motion” – spatial displacement or bodily transformation.
In order to understand the nature of this shared world of emotions, we must come back to specificity of bodily contact. As we have seen in the introduction, touch is not only tactile perception; it is also the site of kinesthetic interaction. In this latter case, the relation with the environment can be absolutely direct if things concretely affect my actions. The encounter with things (shocks, resistance, torsion, support, or constraint) means that I suffer a direct alteration in my power to act. It is not a perceptual relation where it is possible to define a gap between the self as a point of view and the objects that are perceived. By contrast, in the kinesthetic encounter, what touches me does not take the form of sensations, but directly as an action: something makes me move, pushes me, supports me, or re activates me. It is because it touches me (in the physical sense) by interacting with my body-object, that a material object is meaningful, that it can be a support or a threat, that it can be grasped or that it can wound me. In the case of a kinesthetic encounter with another person, there is no gap, no perception of an object constituted in space. What is affected is rather the activity of constitution itself. I recognize myself as touchable by another person to the extent that I am also an object that can be manipulated, taken hold of, or grasped.
The whole vocabulary of an emotional shock reflects an exchange of forces and not of information. I do not master an emotion; it is the emotion which carries me away. The passivity of passion is not a passivity of the reception of sensation, but a passivity of being on the receiving end of an action. I suffer an action; the other person makes me move, moves me emotionally. I am acted upon. We say “it’s poignant”, “it’s striking”.
An emotion is not an object with respect to which one can situate oneself. An emotion is only something that can burst out if it is not contained. However, even if I cannot have access to the reversible control as in the case of a perceptual sensori-motor loop, I can nevertheless have access to my emotion via the bodily effects of what has touched me; the bodily effects which touch me set off and renew my emotion. The spasms of tears renew the sadness, the guffaws of laughter keep up the hilarity, the heartbeats and blood pressure make the anger rise, shortness of breath and palpitations sustain the fear. But it seems to us that this consciousness of emotion, that one can call feeling, is only the local response of a movement whose source actually comes from the relationship with the intentionality of another person. The bodily form of an emotion, although it is sufficient to extend and renew the emotional process, is only an echo of the relational meaning of emotions.
To sum up, what seems to be at stake in the use of the terminology of touch when one speaks of a “touching contact” is rather touch as kinesthetic force and interaction. This also helps us to understand better how it can be quantified, how something can be more or less “touching”, just as something can be more or less heavy, more or less wounding.
But in this case, how can we understand that in the case of distal contact, there is no objective energetic exchange. If emotion imposes itself in these conditions, it cannot be by means of a bodily physical causality from the emitter to the receiver.
The logic of perceptual crossing that we have detailed above can help us again here. We have indeed seen that for each of the participating subjects this interaction can take on the characteristics of a force: a look “catches me”. Now the form of mutual touching that can occur in our experimental set-up is based on a technical mediation that, precisely, does not employ concrete kinesthetic exchanges as could be done by using a force-feedback device. Nevertheless, this mediation does permit a contact between the subjects, i.e. the presence of a “force”, an attractor which presides over their perceptual activities. In order to understand how the dynamics of my perceptual activity can escape from me in this way on the occasion of my meeting with another person, it is necessary to examine the nature of the ignorance which is at the very heart of the possibility of such a meeting.
Double Ignorance in Perceptual Crossing
I can see neither my eyes nor my death. I can directly perceive neither that which enables me to perceive, nor that which lies outside the field of my possible perceptions but which could affect my very power of perceiving. Now it is a remarkable thing that among these perceptions which are impossible for me, there are some perceptions which are possible for another person – and vice versa. Another person can see my eyes, and can see my death. We are not at the same place. This is actually a necessary condition for a real meeting to occur; and it involves two distinct sorts of ignorance, of transparencies of the self for the self. We do not perceive what enables us to perceive (our Leib), nor do we perceive what we offer to the perception of others (our Körper). This remains true for the technical mediations involved in the experimental device that we have presented.
The Transparency of My Lived Body (Leib)
Not perceiving oneself is a condition for perceiving. I cannot see that which confers on me the power to perceive: my eyes are transparent for my vision, as are my optic nerves, my visual cortex, my eye muscles, my spectacles, the air which separates me from the object of my vision. If I were to perceive that which enables me to perceive, I would perceive only that and I would not perceive anything else at all. If my cornea is clouded, if my spectacles are dirty, if the air is misty, I can perceive them to some extent – but my vision is reduced exactly to that same extent. In our experimental paradigm, where the subject perceives by means of a receptor field that he moves in the digital space of the computer screen, it is clear that the subject does not perceive his own receptor fields (if he did, he would perceive nothing else).
However, for the question of contact with another person, this ignorance of the perceiving-body during perception is not sufficient to specify the difference between the “places” of the two subjects. A technical mediation such as a virtual reality system makes it possible to ensure that different subjects are in exactly the same position. Their viewpoints are exactly the same, there is no longer any possibility for meeting because they perceive exactly the same things. Another example: when we are in front of the television, simultaneously looking at the same broadcast, we all share exactly the same viewpoint on the scene, the viewpoint that corresponds to the lens of the camera. It follows that we do not perceive each other. Technical mediations reveal what is evident: if we share the same position, we no longer present a “face” for perception by others.
In order for there to be contact, it is necessary that my perceived partner be in a position that is distinct from that of my perceiving body. In the visual domain, this can take the objective form of a difference in points of view, a spatialisation that makes it possible to articulate in a regular way that which the other person cannot see, because it corresponds to what I could not see if I were in his place. This exchangeability of points of view makes it possible to pass from an egocentric individual perceptual space to a non-centred objective space in which both our points of view can be situated with respect to each other.
However, in the case of emotional interactions we have seen that we must take into account a more original form of perceptual crossing that is not spatialized because it is emotional and empathetic. Now as we have just seen, the transparency of the lived body is not in itself sufficient to ensure a difference in place because it does not prevent us from sharing the same point of view. In order to understand emotional sharing, we must therefore identify a difference in place that is more fundamental because it is not spatial. It seems to us that it derives from the more original fact that we do not ourselves perceive our own body as it is perceived by another person.
The Transparency of My Object-Body (Körper)
My body for another person, the image that I present, is invisible for me when it is a part of my visual system. For example, I do not see directly the colour of my eyes. There again, to the extent that there is a direct link between that which perceives (Leib) and that which can be perceived (Körper), if I were to perceive my object-body, I would perceive only that and therefore nothing else at all. This object-body that I do not perceive and which interests us here is only what is directly linked to my perceiving-body. Of course, I can see my hands, I can touch my eyes, I can perceive the avatar that I control in a virtual space, but only when these objects are no longer directly linked to the perceptual activity that seizes them. In the experimental setup for perceptual crossing that we have presented above, the body-image of a subject that is perceptible by the other is not perceptible for the subject himself. To the extent that the movements of this body-image are exactly linked to those of the receptor field (the perceiving-body), if it were perceived it would obstruct any other perception by permanently saturating the receptor field.
This necessary ignorance of our own body as a possible object for perception by others is a sufficient condition for providing a difference of place between us, since it means immediately that we are not sensitive to the same things. By the simple fact that each of us does not perceive themselves, there is, before any spatialisation, an original difference of “places”, which precedes any differences in spatial position that can be objectively defined in a global space.
Now the fact that first of all I am invisible to myself and that I remain so – even if afterwards, by means of perceptual crossing, I can imagine that I am perceived and therefore perceptible – is a necessary condition for this perceptual crossing to occur. If what I present to the perception of others was an image that I perceived myself, an object of my own perceptual activity, that object would no longer be “linked” to my perceptual activity. The dynamics of perceptual crossing would become impossible.
As it is, the ignorance of my own body-image explains how it is that, in perceptual crossing, my own perceptual activity escapes me. My perceptual activity is indeed at each instant guided by the image of the other person that I cannot manage to determine. I do not manage to determine this image because its movements depend on the way in which the other person reacts to movements of my own image that I myself do not perceive. The joint dynamics of our interactions escapes from both of us because it depends on our images that we do not perceive ourselves. As in kinesthetic interactions, I am directly acted upon, upstream of the determination of my actions with respect to an object that I could perceive. Thus, if I recognize another person, it is not as a determinate entity; it is as something which has the power to affect my own perceptual activity. The intentionality of the other person appears to me as that which comes to link itself to me and to orient my own intentionality; it is like a gaze that captures my gaze, and not like an object that I could look at freely. It is thus because of my ignorance of my image that perceptual crossing can take on for me the meaning of a force which imposes itself on me; that distal contact can take a form that is equivalent to a kinesthetic interaction that carries me along willy-nilly, independently or even against my will.2
For each of us there is a form of asymmetry in the engagement in the interaction: I act in ignorance of what I am doing for the other person, because I do not know my own body-image at the moment it is linked to my perceiving-body. My action is an open engagement; it is not entirely mastered or controlled. And yet it is this body-image which is encountered by the other person and which guides his own perceptual activity. Now we can understand that this confers an emotional value to the contact. It means indeed that I am naked, delivered up to the look of the other person; and he is also naked, offered to my look. Our face is naked, not in the sense that it is not protected by a mask or by make-up, but because we present it to the looks of others without being able to control it as we could if it were an object situated in front of us. On the contrary, our face is caught up in a dynamic that escapes it.
There remains nevertheless an important problem before we can claim to have accounted for “touching” contacts. When each subject is engaged in the dynamics of the perceptual interaction that we have described, it would seem that his ignorance of his own body-image is not as such visible for the partner: when I am engaged in an emotional interaction, I am not aware that my partner does not perceive himself. This would indeed seem to be the case for situations of violent or passionate interaction in which each of the partners is quite carried away. Now we shall see that on the contrary, an essential characteristic of every touching gesture is that the subject who perceives it recognizes at the same time that the gesture in question was produced without any consciousness of the way in which it would be perceived.
Asymmetry and Sincerity
The elements that we have gathered together to characterize the practical conditions of emotional contact have neglected an aspect that is nevertheless essential to what is “touching”: this is the global asymmetry in the relation between that which is touching and that which is touched. Contrary to situations of reciprocal violence and passion, a touching contact is rather marked by a breaking of reciprocity. Let us take as an example a description by Marcel Proust (1927/1931) of a touching situation:
At dinner-time the restaurants were full and if, passing in the street, I saw a poor fellow home on leave, freed for six days from the constant risk of death, fix his eyes an instant upon the brilliantly illuminated windows, I suffered as at the hotel at Balbec when the fishermen looked at us while we dined. But I suffered more because I knew that the misery of a soldier is greater than that of the poor for it unites all the miseries and is still more moving because it is more resigned, more noble, and it was with a philosophical nod of his head, without resentment, that he who was ready to return to the trenches, observing the ‘embusqués’ elbowing each other to reserve their tables, remarked: “One would not say there was a war going on here”. (p. 41)3
What touches the narrator, what makes him suffer, is the resignation that he feels on the part of this soldier. He has no hate, although there would be ample reason for him to be angry. The face of the soldier, his look at the tables and his innocent reflection reveal a gap between his perception of the situation and the situation of the “embusqués” that the narrator knows so well. Above all, what is touching on the part of the person who touches us is the part of him that escapes his control, and which therefore reveals him most truly. It is the effect of an intentionality which concerns us because it touches us… but an intentionality which touches us deeply precisely because its expression largely escapes its author.
In order to understand the perception of this sort of “non-reflective intentionality” in another person, we must now give an account of a break in the reciprocity of the perceptual crossing that has guided us up until now. This new relation can indeed be understood as a partial, oblique perceptual crossing: I perceive the other person, he is looking at a situation to which I have access, but he does not perceive it as I do, at least that is what I believe. Let us spell this out.
Another person is looking at a situation that I share: the soldier on leave looks at the tables behind the restaurant windows, the fishermen look at the narrator dining.
I look at him: the narrator sees the soldier in the same way as he saw the fishermen.
But the soldier does not see that I am looking at him. Nevertheless, he is looking close to where I am, I am involved.
Now, I see that he is not looking directly at me. I recognize that there is no perceptual crossing. If that were to happen in this situation, the shame that is threatening would be suddenly revealed. The narrator could consider that he was recognized as an “embusqué”.
What I understand in this way, as long as I avoid any perceptual crossing, is indeed that the soldier does not see himself. Engaged in his own perceptual activity, he is in ignorance of his own face. I perceive the asymmetry of the situation: I understand that what he is expressing is not under his control and can therefore be sincere.
He does not catch my eye: I can observe him freely. I can latch onto his eyes without him latching onto mine. I can evaluate the relationship between his look and the situation that I perceive besides. It seems to me that unbeknown to him I share his intention, and I even have the impression that I understand it better than he does himself. In fact, did the narrator really hear the remark of the soldier, or did he not rather guess it, understanding it empathetically by putting himself in the other’s place? If he could have actually heard it, that would mean that it was pronounced sufficiently loudly, and this would have been awkward, provoking, and no longer touching.
The incomplete nature of the interaction, the breaking of symmetry, creates something like an opening in the perceptual crossing. The soldier may even have glanced in the direction of the narrator, but without stopping, without catching his eye, without the closure of a perceptual crossing which could not have failed to prevent the awareness of the touching situation but would rather have obscured it by shame or violence.
What is touching, i.e. what has the power to touch me, is an intentional behaviour which does not entirely perceive itself. I understand the intentional aim of the other person; I understand also something that he himself is not fully conscious of (the gap between his situation as a poor soldier and the situation that the guests in the restaurant are embusqués), or at least that he has forgotten at that moment (the fact that he will quite probably die in combat). All the nobility of the soldier’s reflection resides in its sincerity, a sincerity comprising the gift of his life, a real gift because it is not calculated. The soldier does not speak bearing in mind the “permanent risk” of his own death. On the other hand, the narrator sees the presence of this risk in the face of the soldier, and at the same time understands that it is in ignorance of the risk that the soldier looks at the scene. Without hate, without jealousy, he is simply astonished by the absence of the war here in Paris. It is indeed this sincere action, in the ignorance of his own face, which is moving.
It is striking that in everyday relations, much as it is immediately apparent that the people we meet have a situated perception, it is just as easily forgotten that they do not directly perceive themselves. This is nevertheless an important and fundamental fact. In the visual domain, I see immediately that what is behind you escapes your attention; if there is a danger, I know immediately that I must warn you. However, when I interact with you, I forget that whereas you are present, your own face is not present for you. It seems that it is only in an essentially intellectual, deductive fashion that I can understand that you do not see yourself. This sort of blindness, of denial, would seem to be the sign of a constant presence between us of an empathetic interaction, which occurs by means of facial expressions. We have already noted that in the case of emotional exchanges there is no spatialisation, no constitution of an oriented object. This ignorance is something that we share, so that we feel together the same intentional aims.
By contrast, in the touching relationship, when the perceptual crossing is slowed down sufficiently and becomes oblique, the sincerity of the presented face is revealed, and with it the fact that the other person knows nothing of the image he presents comes to be recognized. Since the perceptual crossing is initiated but not fully closed, I catch onto the gaze of the other which responds to the situation which concerns me. By this obliqueness, I can localize and even spatialize his image – but not as a simple object, but rather as linked to a perceptual activity which is itself turned towards the context that I share sufficiently.
To sum up: a situation is touching because I perceive that the other person does not perceive himself. I see that he unmasks himself. And thereby he reveals his emotional and fragile body.
There is an essential relation between what is touching and sincerity. One cannot imagine that an artificial behaviour, or a misleading image, could be touching – unless this effort to control and to dissimulated fails and thereby reveals even more clearly what the other person wanted to hide (this is the way that the failed lie of a child can move us). It is vital to understand this structure of sincerity, because it enables us to generalize what is touching to situations where the synchrony of a face-to-face encounter is quite absent – for example the words written in a letter, a drawing left on a wall, the disarray of objects left after a hurried departure…
The other person is absent, but the traces of his intentional activity which remain present – the image of himself that he has left us – are sufficient for me to link to them my own perceptual activity, to replay the scene and to share his intentional aim; and these traces can be touching precisely to the extent that I consider that they escaped from the conscious control of the person who produced them. If I am touched, if I can feel the expression of a deep intention, it is because I believe that I recognize, in the trace that is left, an image linked to an intentionality that is not entirely mastered, that unmasks itself because it did not attempt, or was unable, to calculate the way in which it would be received.
Conclusion
This enquiry opens many questions, more indeed than it answers. Nevertheless, we hope that we have shown how an experimental study, carried out with minimalist technical systems, can give a number of interesting results. By allowing for a sufficiently detailed analysis of the perceptions and interactions, it makes it possible to propose novel conceptual articulations in order to try to understand the formation of the complex contents of human experience.
Here, we have tried to understand better the role of the semantic field of touch for the expression of emotions. On the physical level, being touched, I discover that I am touchable. On the emotional level, if I am moved, touched to the heart, it is because I share with another person the same emotional nature. Just as a tangible entity can encounter my body and reconfigure my power to act upstream of any definite perception, so it is that something which is emotionally touching comes to disturb me upstream of any conceptual reasoning. Just as I am acted upon and directly moved by a movement which comes to me from the outside, so it is that I am directly moved emotionally by something that is touching. Just as I can be taken hold of by another person against my will, so it is that a poignant emotion can take hold of me.
Now as we have seen in the case of perceptual crossing, such an encounter is only possible if what I give to be perceived by another person is actually attached to my acting body. An expression can only be touching if it seems to us to be sincere, i.e. without any false discrepancy with respect to the intention which animates it. For this to be the case, it is necessary that what we offer to the other person escapes at least partly from our deliberate control. In the situations of everyday encounters, this condition is realized quite simply by the fact that our own face is not visible to us. Our body for others, our face, is the bearer of touching emotional expressions precisely because it is naked, ex-posed, offered spontaneously to the gaze of others.
This provides a number of guiding principles for the design of touching interactions.
The personal characters that can be constructed in various digital media are generally specified by features and preferences that are explicit and socially codified. This is why an avatar that we specify in front of us in a virtual space can never carry expressions that are really touching. If one wishes to obtain an interaction which is warm and expressive, it would be far better for the technical device to equip us with avatars that are invisible to us, and are yet directly linked to our own perceptual activity.
It is certainly not appropriate to try to “prevent” the perception that each subject might have of the image that he presents to the other by arbitrary digital or material constraints. Any artificial constraints of this kind would not fail to be frustrating or irritating. The invisibility of the body-image must be intrinsically necessary by virtue of the interaction device itself. This is what happens quite naturally when the deformations of our image for another subject are indeed linked to the activity of our own perceiving body. This is quite clear for the minimalist tactile interfaces such as those we have used in our experiments. To the extent that the tactile perception is active (what is perceived depends on the exploratory movements of the subject), if the body-image linked to these movements were itself to be perceived by the subject, this would block any other perception. The technical mediation which puts us into contact can only be the bearer of emotion, of meaning, if it gives us a face, perceptible by another person, which is directly linked to our own perceptual activity. In order for a technical mediation to produce a touching contact, it is necessary that this link be maintained intact; it is necessary that the movements of my body-image are indeed a reflection of the movements of my intentionality.
In addition, in order for the contact to prove touching, it is also necessary that the interaction device makes it possible on certain occasions for the perceptual crossing to be oblique, i.e. that there are situations where I can perceive the perceptual activity of the other without being perceived myself. It is only by virtue of such occasions that I can recognize that my partner does not perceive his own body-image.
In a digital environment where the meeting with avatars is possible, one can imagine a direct application of these principles. For example, for visual perception, one can imagine that the movements of my eyes (captured by an eye-tracker) serve to guide the movements of the eyes drawn on my digital avatar. In this case, I could not see the movements of the eyes of my avatar because, just as in front of a mirror, I could only see immobile eyes. For the tactile modality, we have developed a device which makes it possible to have tactile interactions in virtual two-dimensional space shared on the Web. The interface grasped by each subject consists of a matrix of tactile pins, and a tactile surface sensitive to the spatial distribution of hand pressures. This pressure surface defines at each instant, at the same time, the virtual touching hand and the virtual touchable hand. The encounters between this receptor surface and virtual objects control the activation of the tactile pins. At the same time, the same pressure surface defines the form of the virtual hand as a shape that the partner can explore. There again, we see that the perceiving body (Leib) and the body for the other (Körper) are linked, and thus that I cannot perceive the body that I present to the Other. On the basis of these principles we are currently developing a tactile Internet and several forms of tactile telephones.
Acknowledgments
I want to thank John Stewart, Gunnar Declerck, Francois Sebbah, Barthélémy Maillet, and Dominique Aubert for their help and advice while carrying out this work.
Endnotes
- To the extent that the perceptual activity of perceptual crossing is specific, and different in kind to the localisation or the recognition of the shape of an object, recognition of the presence of the gaze of another person cannot be the result of a cognitive inference based on criteria that would apply to previously determined behaviours. (Premack 1990; Csibra, Biro, Koos, & Gergely 2003). Another person can be recognized not through his image, nor by an objective behaviour, but by his perceptual activity in its relation with mine (Lenay, Auvray, Sebbah & Stewart, 2006; Auvray et al., 2009).
- We can quote here the beautiful question that Jacques Derrida takes up from Jean-Luc Nancy: “When our eyes touch, is it day or night?” (Derrida, 2000) A possible translation in the terms of our context here might be: “in perceptual crossing, is something constituted as a set of distinct objects in the light of a shared world (i.e. in the space of points of view); or does that which is between us rather belongs to the obscure depths of emotional encounters?”.
- “A l’heure du dîner les restaurants étaient pleins et si, passant dans la rue, je voyais un pauvre permissionnaire, échappé pour six jours au risque permanent de la mort, et prêt à repartir pour les tranchées, arrêter un instant ses yeux devant les vitrines illuminées, je souffrais comme à l’hôtel de Balbec quand les pêcheurs nous regardaient dîner, mais je souffrais davantage parce que je savais que la misère du soldat est plus grande que celle du pauvre, les réunissant toutes, et plus touchante encore parce qu’elle est plus résignée, plus noble, et que c’est d’un hochement de tête philosophe, sans haine, que prêt à repartir pour la guerre il disait en voyant se bousculer les embusqués retenant leurs tables «On ne dirait pas que c’est la guerre ici.» » (Proust, 1927/1931, p. 41).
References
- Argyle, M., & Cook, M. (1976). Gaze and mutual gaze. London: Cambridge University Press.
- Auvray, M., Lenay, C., & Stewart, J. (2009). Perceptual interactions in a minimalist virtual environment. New Ideas in Psychology, 27(1), 32-47.
- Cannon, W. (1928). Bodily changes in pain, hunger, fear and rage: An account of recent researches into the function of emotional excitement. New York: Appleton-Century.
- Csibra, G., Biro, S., Koos, O., & Gergely, G. (2003). One-year-old infants use teleological representations of actions productively. Cognitive Science, 27(1), 111-133.
- Deckers, E. J. L., Westerhoff, J., Pikaart, M., van Wanrooij, G. A. F., & Overbeeke, C. J. (2009). How perception gets emotional value through the use of an object. In Proceedings of the 4th Conference on Designing Pleasurable Products and Interfaces (pp.104-115). Compiègne, France: Université de Technologie de Compiègne.
- Derrida, J. (2000). Le toucher, Jean-Luc Nancy. Paris: Galilée.
- Gallese, V. (2009). The two sides of mimesis. Journal of Consciousness Studies, 16(4), 21-44.
- Hawthorne, N. (1999). Tanglewood tales. New York: Tom Doherty Associates.
- James, W. (1884). What is an emotion? Mind, 9(34), 188-205.
- Lenay, C., Auvray, M., Sebbah, F.-D., & Stewart, J. (2006). Perception of an intentional subject: An enactive approach. In Proceedings of the 3rd International Conference on Enactive Interface (pp. 37-38). Montpellier, France: University of Montpellier.
- Premack, D. (1990). The infant’s theory of self-propelled objects. Cognition, 36(1), 1-16.
- Prinz, J. (2003). Emotion embodied. In R. Solomon (Ed.), Thinking about feeling (pp. 1-14). New York: OUP.
- Proust, M. (1931). Le temps retrouvé [Time Regained] (S. Hudson Trans.). London: Chatto & Windus. (Original work published 1927).
- Reddy, V. (2003). On being the object of attention: Implications for self-other consciousness. Trends in Cognitive Sciences, 7(9), 297-402.
- Rolls, E. T. (1999). The brain and emotion. Oxford: Oxford University Press.
- Sartre, J. -P. (1938). Esquisse d’une théorie des émotions. Paris: Herman.
- Sartre, J. -P. (1943). L’être et le néant. Paris: Gallimard.
- Sribunruangrit, N., Marque, C., Lenay, C., Gapenne, O., & Vanhoutte C. (2004). Speed-accuracy tradeoff during performance of a tracking task without visual feedback. IEEE transactions on Neural Systems and Rehabilitation Engineering, 12(1), 131-139.
