
Using Pet-Dog Behavior Traits to Enhance the Emotional Experience of In-Car Interaction
Yea-Kyung Row *, Se-Young Kim, and Tek-Jin Nam
Department of Industrial Design, KAIST, Daejeon, Republic of Korea
Although research on smart cars has rapidly expanded, relatively little attention has been paid to improving users’ emotional experiences. This research was based on a petmorphic design approach, which defines design attributes assuming an intelligent device can interact like a pet dog. In this paper, we present a set of pet-dog behavioral traits (PBT) and their application in enhancing emotional interaction in smart cars. Firstly, using an interview-based explorative study, we identified key pet-dog characteristics that elicit affection in owners and four PBTs that could be used to design smart car interactions: self-expression, empathy, faithfulness and innocence. Secondly, we conducted an online survey-based study to examine how PBTs can be incorporated into smart cars for different scenarios. The results indicated that faithfulness was typically preferred in routine scenarios while traits associated with innocence were less preferred. We discuss the desirable use cases for each PBT and how PBT can be applied as a function of autonomy according to the urgency of a situation. We also discuss how PBT could enhance users’ emotional experiences by increasing agreeability, emotional bonding, delightfulness and generous attitudes.
Keywords – Emotional User Experience, Intimate Interaction, Petmorphic Design Approach, In-Car Interaction, Smart Car.
Relevance to Design Practice – A petmorphic design approach can help designers promote emotional interactions in smart systems. Pet-dog behavioral traits (PBT) and the results regarding the preferred match between PBT and use cases can be used as references when applying petmorphic interactions to smart cars and other intelligent systems.
Citation: Row, Y. -K., Kim, S. -Y., & Nam, T. -J. (2020). Using pet-dog behavior traits to enhance the emotional experience of in-car interaction. International Journal of Design, 14(1), 19-34.
Received December 29, 2018; Accepted November 18, 2019; Published April 30, 2020.
Copyright: © 2020 Row, Kim, & Nam. Copyright for this article is retained by the authors, with first publication rights granted to the International Journal of Design. All journal content, except where otherwise noted, is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 2.5 License. By virtue of their appearance in this open-access journal, articles are free to use, with proper attribution, in educational and other non-commercial settings.
*Corresponding Author: emilie0225@kaist.ac.kr
Yea-Kyung Row is a Ph.D. student in the Department of Industrial Design at KAIST, South Korea. She received a Bachelor’s degree from the Department of Human Environment & Design and took a minor in psychology at Yonsei University, South Korea. She researches design methods that apply animistic thinking to smart environment design for intimate interactions. She recently proposed a design tool for generating design concepts employing design properties attributed to pet dogs.
Se-Yeong Kim is a graduate student (master’s degree) from the Department of Industrial Design at KAIST, South Korea. She belonged to Co.Design:Interaction Design Research Laboratory at KAIST. She received a Bachelor’s degree from the Department of Art & Technolgy at Sogang University, South Korea. She is interested in designing new types of interactions which are intimate and intuitive. Her main research areas are multimodal interaction and thermal feedback design.
Tek-Jin Nam is a professor in the Department of Industrial Design at KAIST. He received a B.S. and an M.S. in Industrial Design from KAIST and a Ph.D. in Design Technology from Brunel University. He leads the Co.design: Inter. Action Design Research Laboratory at KAIST. His main teaching subjects include interaction prototyping, interactive product design, system design and design research issues. His research interests are design-oriented human-computer interaction, focusing on creating people-centric values of future products and services and a systematic approach to creative design and innovation. He is also interested in integrating design research and practice.
Introduction
Smart cars are vehicles that can autonomously interact with users using ICT (information and communication technology) and artificial intelligence (Moite, 1992). With the advent of innovations in electric-powered cars, mobile connectivity and autonomous driving, smart cars have become major attractions for interaction designers. The importance of enhancing users’ emotional experiences with smart cars is widely recognized since it can increase driving pleasure and contribute to driving efficiency and safety (Braun et al., 2019; Casner, Hutchins, & Norman, 2016; Gkouskos & Chen, 2012; Gomez, Popovic, & Bucolo, 2008; Sheller, 2004). Emotional engagement with smart systems can enhance reliability and acceptability by improving the overall user experience (Casner et al., 2016; Rödel, Stadler, Meschtscherjakov, & Tscheligi, 2014).
Recent research has focused on approaches that promote emotional interaction with smart vehicles, including affective computing (Braun, Weiser, Pfleging, & Alt, 2018; Healey & Picard, 2005; Hernandez et al., 2014), user-centered experience design (McVegh-Schultz et al., 2012; Meschtscherjakov, Wilfinger, Gridling, Neureiter, & Tscheligi, 2011; Perterer, Sundström, Meschtscherjakov, Wilfinger, & Tscheligi, 2013) and gamification (Steinberger, Schroeter, Foth, & Johnson, 2017; Sundström et al., 2014). Such approaches have produced engaging human-vehicle interactions via empathy with drivers (Braun et al., 2019; Hernandez et al., 2014), providing personalized and meaningful experiences (McVegh-Schultz et al., 2012) and creating enjoyable interactions through entertainment (Steinberger et al., 2017). Such approaches have produced engaging human-vehicle interactions via empathy with drivers (Braun et al., 2019; Hernandez et al., 2014), providing personalized and meaningful experiences (McVegh-Schultz et al., 2012) and creating enjoyable interactions through entertainment (Steinberger et al., 2017).
Such research, however, has focused on specific driving scenarios, such as coping with driver stress (Healey & Picard, 2005; Hernandez et al., 2014) or providing in-car entertainment (Sundström et al., 2014). Few user-centered design approaches have aimed to holistically improve the long-term experience of driving (McVegh-Schultz et al., 2012). Moreover, there is sparse research on improving emotional interaction in practical design processes. It is challenging to generalize design implications to other scenarios while also directly applying theoretical results to the design process. Since concepts such as emotional design remain foreign to the smart vehicle industry (Gkouskos & Chen, 2012), it is necessary to propose practical design methods or conceptual tools to generate innovative design ideas that promote emotional interaction in smart cars. To address this, we focused on petmorphic design as a means of promoting intimate smart car interactions with users. Intimate interaction refers to emotional interaction in a concrete sense, that is, an interaction that creates an enjoyable experience, fosters an engaging and attentive attitude and forms emotional attachment. The outcomes of intimate interaction represent user satisfaction.
The petmorphic design approach defines design attributes on the basis of intelligent devices that mimic pet-dog behavior (Jacobsson, Ljungblad, Bodin, Knurek, & Holmquist, 2007; Kifor et al., 2011; Kim, Row, & Nam, 2012; Löffler, Kaul, & Hurtienne, 2017; Nguyen & Kemp, 2008; Row & Nam, 2014; Singh & Young, 2013; Szabó et al., 2010). It is proposed that by better understanding the relationship between pet dogs and their owners, designers and technology developers can design more affective intelligent systems. Prior work has shown the potential of integrating pet-dog characteristics into human–machine interactions with smart products to enhance users’ emotional experience and satisfaction (Löffler et al., 2017; Row & Nam, 2014). Similarly, some researchers have noted the importance of a symbiotic driver–vehicle interaction for emotional satisfaction (Norman, 2009; Ramm, 2018; Riener, 2012). Although prior literature provides a theoretical basis for a new interaction model, few studies have investigated which pet attributes promote emotional interaction and how to implement them in smart car design.
To systematize and further understand the petmorphic design approach, this study aimed to identify affective pet-dog behavioral traits (PBT) for smart car interaction design and to explore their application in various typical car-use scenarios. We conducted two studies. Firstly, we conducted an explorative interview to identify the perceived characteristics of pet dogs that endear them to their owners and elicit affective experiences and to envision these identified characteristics to driving contexts. In this way, we obtained a set of pet-dog behavioral traits (PBT) to apply to smart car interactions. PBT can be grouped into four categories: self-expression, empathy, faithfulness and innocence. In the second study, we conducted an online survey to investigate how to suitably use PBT in various typical driving scenarios. The survey results indicated that each PBT has a use case that is most appropriate. The trait faithfulness was universally preferred in various use cases while innocence was less welcomed. The suitable application of each PBT to use cases is discussed in detail, followed by the presentation of a framework illustrating how petmorphic smart cars can interact with users in terms of various levels of autonomy. Finally, we discuss the implications of enhancing the affective experience of smart cars by using the petmorphic design approach.
Related Work
Affective Human-Vehicle Interaction
With the increasing use of smart cars, affective human-vehicle interaction (HVI) has become a popular research topic (Rödel et al., 2014). Yet, as car functions become more complicated, drivers experience more stress and such negative emotions are among the main causes of aggressive and risky behavior while driving (Dula & Geller, 2003; Vanlaar, Simpson, Mayhew, & Robertson, 2008). Providing pleasant experiences and maintaining an emotionally stable environment can help drivers to develop an attentive attitude and trust with cars, which in turn enhances user satisfaction, driving performance and user safety (Gkouskos & Chen, 2012; Gomez et al., 2008; Williams & Breazeal, 2013).
Smart cars are narrowly defined as automobiles capable of autonomous driving (Moite, 1992) using ICT or artificial intelligence, such that smart cars have been conceptualized as embodied agents and even social entities (Müller, Risto, & Emmenegger, 2016; Ramm, Giacomin, Robertson, & Malizia, 2014; Waytz, Heafner, & Epley, 2014). Strategies for affective robot design are often adopted to design intimate interactions with smart cars (Arkin, Fujita, Takagi, & Hasegawa, 2003; Fong, Nourbakhsh, & Dautenhahn, 2003; Reeves & Nass, 1996; Sung, Guo, Grinter, & Christensen, 2007). There have been previous attempts to develop interactive in-car systems that detect drivers’ feelings, manage users’ emotions (Braun et al., 2018; Healey & Picard, 2005) and integrate the concept of an organism with agency into cars (Toto, 2010; Waytz et al., 2014; Williams & Breazeal, 2013; Williams, Peters, & Breazeal, 2013). Indeed, the future of intimate HVI could involve using robotic agents to enable friendly human–vehicle communication (Nissan Motor Company Ltd., 2005; Toto, 2010; Waytz et al., 2014; Williams & Breazeal, 2013; Williams et al., 2013). These approaches have room for improvement in terms of practical knowledge and design strategies. Design cases (Brandrick, 2012; Toto, 2010) are often not sufficiently grounded in theoretical work (e.g., many have inadequate design rationales) and it is hard to attain valid insights into how to apply new designs (e.g., many are conceptual proposals without empirical support).
Recent research has reported novel attempts to expand the possibilities of intimate smart car interaction by developing longterm human-vehicle relationships or generating playful interaction. Such attempts include providing personalized event logging (McVegh-Schultz et al., 2012), supporting in-car entertainment through body-movement interaction (Sundström et al., 2014) and supporting collaborative engagement between the car AI and the user (Perterer et al., 2013). Nevertheless, emotional design has yet to be introduced into practical design processes (Gkouskos & Chen, 2012). Though several researchers have developed tools to promote or evaluate the perceived intimacy and affective qualities of driving experiences (Dula & Geller, 2003; Healey & Picard, 2005; Perterer et al., 2013; Ramm et al., 2014), the tools have primarily focused on assessing their use rather than facilitating the design process. The literature overview and evolved smart car competence suggest a need to further investigate new interaction modalities suited to intimate interactions between smart cars and users.
Connotations of the Petmorphic Design Approach
Pet analogies have traditionally been used to leverage the associated images of the affective, intimate and hedonic characteristics of pets. A typical design approach for lifelike actuated devices is to mimic the familiar traits of pets. For example, metaphors for dogs and other pets have been commonly used to produce natural interactions in companion robots dubbed artificial pets (De Graaf & Allouch, 2017; Fujita, 2001; Lee, Peng, Jin, & Yan, 2006; Saldien, Goris, Yilmazyildiz, Verhelst, & Lefeber, 2008). Many studies have attempted to design petmorphic or zoomorphic interactive systems that employ pet-inspired characteristics to facilitate user interaction (Helmes, Hummels, & Sellen, 2009; Jacobsson et al., 2007; Kifor et al., 2011; Kim et al., 2012; Kovács, Szayer, Tajti, Korondi, & Nagy, 2011; Löffler et al., 2017; Row & Nam, 2014; Szabó et al., 2010). Existing pet-like intelligent design cases suggest that pet-like interactive systems can also produce emotional experiences that are endearing, pleasing and relaxing (De Graaf & Allouch, 2017; Löffler et al., 2017; Row & Nam, 2014).
These studies suggest that pet interactivity could lead to products designed for more pleasant user experience, showing potential for emotional satisfaction. However, how to implement pet characteristics in the design process has not been fully addressed. Although previous work has investigated the potential impact of petmorphic design on emotional experience, it has remained at an exploratory stage due to limited consolidation of design models and practical frameworks.
In line with previous studies, our attempt to implement petmorphic design is based on several future HVI-related visions. It has been suggested that in the future, the symbiotic horse–rider relationship should be associated with the relationship between vehicles and drivers (Flemisch et al., 2003). Moreover, the emerging neo-animism paradigm for IoT (Internet of Things) products may also suggest a direction for conceptualizing animistic smart cars in the future (Marenko, 2014; Marenko & van Allen, 2016). Marenko suggests that the experience of everyday objects is increasingly colored by animistic connotations, the idea that objects and other nonhuman entities possess the qualities of personhood (Marenko, 2014).
Future smart vehicles will need to be more natural and intuitive to use to avoid user confusion over system complexity and such driver-vehicle confluence can be achieved by employing new forms of driver-vehicle interactions (Riener, 2012). We argue that intimate interactions in smart cars can be developed further by detailing the characteristics of petmorphic design attributes and understanding the relationship these characteristics may have to smart car-use scenarios.
Exploratory Study of Pet-Dog Behavioral Traits (PBT)
Aim and Method
To identify the pet-dog behavioral traits (PBT) applicable to smart car interactions, we conducted an explorative study with two aims: 1) to investigate the key pet-dog characteristics that are pleasant and evoke emotional experiences in human–dog interactions and 2) to identify pet-dog behavioral traits adjusted for smart car interactions.
Sample
The study was conducted in South Korea, where the use of facilities for pet dogs such as a pet kindergarten or pet department store are popular (Podberscek et al., 2009). Twelve participants (5 male, 7 female) with an age range of 21-58 years (M = 26.1, SD = 2.2) were recruited using an advertisement placed at pet hospitals and hotels. All participants had experience owning one or more dogs within a range of three months to 18 years (M = 7.86 years, SD = 6.09). All owned a car and used it regularly.
Procedure
The study involved a two-part interview process. Firstly, we conducted semi-structured interviews. Participants were asked to prepare photos in advance that showed a pleasing behavior by their dogs as well as a memorable moment with their dogs. Participants were then asked to select their favorite dog photo. Participants were prompted to describe situations where they experienced emotional interactions with their dogs (i.e., a moment they experienced substantial emotional attachment or affection) using these photos. The structured questions focused on three facets of canine-human affective experiences: 1) intimacy and emotional rapport, 2) delightfulness and pleasurableness and 3) laudability and reward (Row & Nam, 2014). We also inquired about participants’ general communication with their dogs (Goode, 2007). Since dog owners tend to develop communication skills with their dogs (Shapiro, 1990), we expected the participants to recall moments of emotional interaction. Example questions included, “How do you know your pet is unhappy?”, “Do you think your dog can read your mind?” and “Is that kind of experience positive? If so, why?”
Secondly, we conducted contextual interviews in the participants’ cars to involve users generating design ideas (Sanders & Stappers, 2012; Visser, Stappers, van der Lugt, & Sanders, 2005). Participants were prompted to imagine their dog’s soul was in their smart car and to envision its likely reactions in several driving contexts. We collected data on typical cases of private car use including risky situations and maintenance (Dula & Geller, 2003; Neale et al., 2002) and 11 driving scenarios were presented: (1) entering the vehicle, (2) waiting for traffic signals, (3) receiving guided navigation, (4) refueling the car, (5) dozing off, (6) in-car entertainment, (7) becoming distracted, (8) speeding, (9) washing the car, (10) an accident and (11) parking. The questions in the contextual interviews included, “How would the dog as a car react in each scenario?” and “How would you like the emotional interactions with your dog that you mentioned to be integrated into using a smart car?”
Data Collection and Analysis
Each interview was 90 minutes on average and all interviews were audio recorded and transcribed. We used thematic analysis (Krippendorff, 2013; Smith, Bekker, & Cheater, 2011) to systematically analyze user-generated data and identify patterns and structures (Aspling, Juhlin, & Väätäjä, 2018; Burgess, King, Harris, & Lewis, 2013; Ramm et al., 2014). The initial identification and labeling of themes involved the semantic-level coding of content. Thereafter, keywords related to the emotional facets of pet-human interactions were extracted and adapted to the smart car context. Then, we iteratively integrated keywords into superordinate themes to find emerging patterns. We clustered the participants’ statements based on their reports of their dog’s characteristics and analogous reactions in a smart car. Two researchers conducted the initial analysis of each interview, annotating and coding the participants’ transcripts based on established guidelines of six phases: 1) familiarizing yourself with your data, 2) generating initial codes, 3) searching for themes, 4) reviewing themes, 5) defining and naming themes and 6) producing the report (Braun & Clarke, 2006).
When interpreting the descriptions of smart car interactions, we focused on the link between an emotional characteristic of dogs and its potential application to simulating affect in smart cars. For example, we interpreted M2’s statement, “If you try to wash Sunny, he will bounce the water off and veto it,” in relation to prior statements and themes indicating that dogs are cute when they stubbornly resist doing things they dislike. From this, we could assume that people would expect a petmorphic smart car to sometimes refuse the owner’s orders. Broad keywords were developed for the 452 corresponding transcripts, these being refined through a repetitive process of interpreting the transcripts. For example, from the initial interpretation that “users expect a petmorphic smart car to identify their emotional or psychological state and respond accordingly”, we developed keywords such as mind-connected and thoughtful and persistent. These were further refined and associated with the theme of empathy.
To verify the coding and interpretations, a set of categorized themes were checked against Patton’s dual criteria of internal homogeneity (i.e., the data are meaningfully coherent) and external heterogeneity (i.e., each theme is clearly distinct from other themes) (Patton, 1990). Three researchers, including one not involved in the initial analysis, independently confirmed that each category had internally coherent meanings. We ensured that the main themes were representative of the data and that each theme was distinct from other themes by checking whether different themes could be interrelated, combined or separated. For example, we ultimately proposed trait empathy, which consisted of two subordinate traits, sympathy and care. We cross-checked whether the original intention was compromised by repetitive interpretation while comparing it with the initial impressions.
Results
Key Characteristics that Induced Emotional Experiences
Self-Centeredness and Proactivity
One of the most common characteristics that elicited affection in owners was that pets had their own thoughts and preferences and actively communicated them. Participants found it interesting to observe their pet dogs curiously and persistently explore what they were interested in or stubbornly ask for what they want. M1 reported “When we walk outside, my dog only sits on the newspaper. He does not like the cold ground. I find that cute.” F2 also stated “I also feel happy when my puppy gets really excited while taking a walk, sniffing all around the park.” Pet dogs sometimes showed strong resistance to engaging in undesirable tasks such as bathing or dressing. Pet dogs were not always obedient to owners and participants perceived their volition to express their own opinions as cute and cuddly. Eight of the 12 participants said they liked their dog’s resistance to certain owner behaviors. M4 reported that he sometimes enjoyed teasing or annoying his puppy to see it struggle to escape with a sulky expression.
Empathy and Consideration
The second characteristic noted by participants was their pet’s sensitivity to context and empathetic responses. Participants perceived their pets as intelligent enough to comprehend the situational context or emotional mood of the house (e.g., sadness or joyfulness). Five participants reported experiencing deep emotional bonds with their pets when their dogs showed empathetic and sympathetic responses to the situational context. For example, M2 reported, “When father is angry, or the atmosphere of the house is dark, Sunny does not pester him to play but stays calm next to him.” F1 explained the moment when her dog comforted her: “I was very depressed and sad and crying in my room. It licked my tears with its tongue as if to comfort me. I was really moved.” A few participants (F2, F7) felt their dog was praiseworthy for patiently abstaining from its desires or instincts when they were busy or concentrating on something. F7 said, “My dog was adorable when he waited on my lap until the movie finished and ran to the bathroom as soon as I got up. At that time, I thought his action was commendable.”
Faithfulness
The characteristics of being loyal and understanding their owners caused participants to feel more emotionally attached to their dogs. Ten participants said it was delightful and interesting when their dogs gave full attention to and followed their owners. F5 mentioned, “My dog follows me everywhere I go, even to the bathroom just like gum. [It] always wants to stay close to me.” M1 mentioned that the fact that his dog wanted to do all actions with him made them lovable, saying, “Do you know how lovely my dog is when he falls asleep in a defenseless way, staying close to my head? […] He always gives me unconditional love.” F1 said, “We couldn’t eat with Geommy because my family eats at the table. When we eat, he always hangs around and groans. When we move the bowl next to us, he stops groaning and starts eating.”
Other participants felt emotionally engaged when their pet dogs recognized them and other owners. F2 said, “When the car is parked, the voice of the home auto-system [a smart home feature that informs people in the house when a family car is in the underground parking lot] comes on automatically. When [the dog] hears that, he starts waiting at the front door. When dad comes and opens the door, he spins around and jumps until dad gives him a hug.” Half of the participants reported feeling deep emotional bonds with their dogs when they felt their dogs learned what they said through their long-term relationship or special training. For example, F7 said, “Mini understands when we say ‘let’s just go.’ She jumps and waits at the front door when she hears that. Sometimes, she is already where we were going to go.”
Dependency
Nearly all participants said they found their dogs adorable when they expressed a need for affection by wagging their tails, snuggling up to them, or welcoming them by jumping around. Participants felt the dogs became more emotional because of their vulnerability, requiring regular care and constant attention. F4 explained it was like the feeling of maternal love as her pet dogs cannot live without her. M3 felt responsible for his dog, which made him more engaged with his dog: “I feel a strong emotional attachment to my dog when it is waiting the entire day for me to feed him.” Caring for pet dogs often requires financial expenditures and participants reported this also enhanced emotional attachment. M2 said, “A puppy requires a great deal of care such as bathing, hairdressing and feeding. It costs a lot of money and effort. […] But he cannot do anything without me and that makes me love my puppy.” F4 said, “My attachment to the dog grew because I invested so much.”
PBT Applied to Petmorphic Smart Cars
Trait Self-Expression (TA)
Participants described an affective petmorphic car as an independent presence. They envisioned a petmorphic smart car as having its own preferences or intelligence as an autonomous entity, capable of conscious decisions. The participants expected that a petmorphic car could actively express its opinions to its owner. For example, M2 said, “Sunny [name of his petmorphic car] will play classical music. A song my dog usually likes.” M3 also mentioned that a car would have its own preferences: “The car would guide me to a good gas station to get decent fuel.”
Trait self-expression was further subdivided into three detailed traits: suggestion, inducement and interruption. Firstly, participants would like smart cars to be able to recommend useful information or content based on the car’s own preferences or intellectual judgments. Four of the 12 participants reported that their petmorphic smart car would suggest a favorite destination or play music their actual pets might enjoy. F5 said, “It will suggest going to a park or a nice place for driving. When I take a walk with my doggy, he smells, becomes absorbed and goes to other places.”
Secondly, participants wanted cars to actively lead the driver to act in ways that are beneficial to the car. They described a situation in which a petmorphic smart car would repeatedly express a suggestion regarding a desired parking space or gas station to persuade drivers. F1 mentioned, “Would it not bring me toward where the shade is? The place where it is safe and has no cars? When I went to the café where pets are allowed, we took him to the table he wanted. If I try to park at some other place, then the car would make a horn sound and try to lead me to other places.”
Thirdly, participants thought that if the driver’s behavior were inappropriate, the car could disobey the command or interfere with their behavior. Ten participants expected that their petmorphic car could sometimes resist or be too stubborn to permit the owners’ operation. F4 stated, “The car would refuse to take my control when I am drunk by frowning or barking.”
Trait Empathy (TB)
Participants expected a petmorphic smart car to respond to user emotions and environmental changes with contextual awareness and situational judgment. Seven participants mentioned this. Participants wished their car could provide relevant actions to a driver based on its own judgment.
Trait empathy is based on two subtraits: care and sympathy. Firstly, participants expected that the smart car would adjust to a supportive and encouraging interaction style when the driver was in a negative emotional state. For instance, F6 said, “If I got nervous while driving, the car would keep encouraging me and avoid expressing unnecessary information so I could focus.”
Secondly, participants hoped the smart car could understand the driver’s feelings and environmental mood so that it would respond sympathetically. F7 mentioned the possibility of a car having empathy: “When it is cloudy and I feel gloomy, the car would play calm music as if it could understand my feelings.” Some participants (M2, F6, F7) also implied that the car’s empathy should grow over time as it accumulated user data.
Trait Faithfulness (TC)
Participants anticipated that a petmorphic smart car would show a particular familiarity with its owner by recognizing the owner’s identity and behaving differently with other people. Trait faithfulness consisted of two subtraits: loyalty and personalization. Participants wanted the car to only show undivided support for the owner. F3 said, “I hope the car will recognize people I dislike and not welcome them when they try to open the door.” Some participants hoped the car would have specialized features for the owner. Participants wanted a petmorphic smart car to know the driver’s personal information and habits, such as preferences, daily schedule or any use patterns. Participants wanted cars to provide optimized services that fit with their lives. F5 said, “When I get into the car, I hope that it will open the door and adjust the settings automatically to welcome me.” F6 suggested, “I want the car to introduce me to new restaurants based on my preferences and history when I feel hungry.”
Trait Innocence (TD)
Trait innocence reflects showing dependency on the owner. Participants anticipated that the car would show emotional expressions to arouse the owner’s protective instincts. Participants believed a petmorphic smart car would require the owner’s care. For example, participants considered a potential situation where a car would express excessive emotion to demand owner action. This trait was further characterized into three behavioral subtraits: appreciation, apology and emotional appeal. Firstly, participants expected that a smart car would express appreciation when the driver met the car’s needs. Eight participants expected the car to express joy by, for example, moving the side-view mirrors or wipers after being washed or refueled.
Secondly, participants expected a smart car to gently ask to be excused by reporting predictable problems in advance. Participants also expected that smart cars would express regret or shame when trouble arises. M2 said innocent behavior in a smart car would induce generous behaviors, noting the possibility of a petmorphic car making mistakes: “I would feel generous, even though it guides me the wrong way, if it really seems to be my pet.”
Thirdly, participants expected smart cars to draw the driver’s attention and express their needs in an appealing way by using excessive emotion. M1 said, “Queen likes to eat too much, so this car will express its hunger, even though the gas is not low, through a rumbling sound.” F3 explained, “If my petmorphic car possibly gets sick when I forget about system updates or maintenance, I would be willing to take care of it in advance.”
Discussion
Table 1 summarizes the findings described above. Some characteristics echo the results of previous research on the relationship between humans and pet dogs (Dotson & Hyatt, 2008; Endenburg & Bouw, 1994; Fogle, 1981; Gaunet, 2010; Hirschman, 1994). Our findings also suggest that pet dogs play the role of friend or companion by giving their masters care, comfort and calmness, while pet dogs also need love and affection from their owners.
Table 1. Explorative study findings.
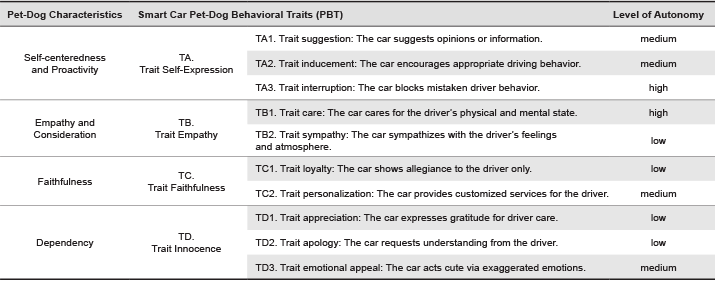
Pet-dog behavioral traits can be featured depending on how proactive and assertive the characteristic is. Adopting the view that autonomy is a capacity for agency in terms of controllability and activeness (Blumberg & Galyean, 1995; Gruber, Aune, & Koutstaal, 2018; Parasuraman, Sheridan, & Wickens, 2000), smart car interactions with PBT are characterized by different levels of autonomy. We classified PBT into three levels of autonomy based on the criteria of controllability and activeness. The right side of Table 1 shows the relevant autonomous level of each applied PBT interaction. Since interactions based on the interruption trait can oppose or enforce user operation, we considered this trait to have a high level of autonomy due to its high controllability. We also considered trait care (TB1) to have high autonomy because it proactively influences the user’s mental and physical wellness. At the highest level of autonomous interaction, a smart car can directly take action and disregard driver intentions.
At the middle level, a smart car can provide directions that are expected to be performed in a moderate manner. For example, a smart car with trait inducement can persuade or stimulate a user to perform a certain behavior while leaving the final decision to the user. At the lowest level, the smart car has less control. It can only provide information to motivate driver behavior and the driver takes sole responsibility for the action. The lowest smart car interactions offer no assistance. Trait sympathy and trait loyalty can be classified at this level since interactions based on those traits can present social and emotional expressions to users without affecting user behaviors.
These results provide initial insight into how to use the identified pet-dog characteristics in designing intimate smart car interactions that might produce more affective experiences for users. When designing a smart car interaction, it may be possible to apply the appropriate PBT according to the autonomy level of the smart car interaction. We also speculate that some pet-dog behavioral traits might be more appropriately applied in specific contexts. For example, trait interruption (TA3) is expected to be suitable in situations where drivers try to perform dangerous behaviors. However, it is necessary to further investigate these relationships to formulate design suggestions concerning the application of PBT.
Online Survey Applying PBT in Driving Situations
Aim and Method
This survey study aimed to understand how pet-dog behavioral traits (PBT) could be applied to a smart car’s interactions in use cases. We wanted to clarify the most desirable use cases for each PBT in smart cars and how each PBT can be applied to different use cases so that the use scenario is welcomed by users. We conducted an online survey to investigate whether the application scenarios of different PBTs in particular driving situations were appropriate and, if so, why such scenarios were preferable.
Survey Design
The survey was designed to evaluate 100 application scenarios using two independent variables (driving situation with 10 levels and PBT with 10 levels). We used imaginary scenarios to familiarize users with novel situations in the survey (Finch, 1987). The selective representation of real user scenarios can help disentangle the complexities and conflicts present in real-world situations (Hughes & Huby, 2002).
We constructed a short-trip narrative using a smart rental car that covered various aspects of car use, including situations that were task oriented (e.g., refueling, listening to music), situationally determined (e.g., first meeting, returning), or covered a period of use (e.g., adaptation). We selected the rental car context to naturally integrate the various use cases into the narrative of a single-day trip. This allowed us to substitute situations over time (e.g., adaptation and disposal) with more realistic situations (e.g., adaptation and returning) so they could be more easily imagined.
The 10 representative driving situations were selected based on previous studies (Dula & Geller, 2003; Neale et al., 2002): (S1) first ride in car, (S2) adjusting to car, (S3) following car guides, (S4) listening to music, (S5) driving while drowsy, (S6) speeding, (S7) car requires fuel, (S8) parking, (S9) reentering car and (S10) returning car. When selecting situations, we considered realistic and commonplace situations (e.g., leaving a car) rather than rarely experienced situations (e.g., discarding a car). We refined ambiguous situations (e.g., adjusting to the car) to be more specifically described (e.g., learning how to use the car).
We created 100 applied scenarios that were concretely explained and expressed in familiar representations by using cartoon-style illustrations so participants could easily understand and immerse themselves in the scenarios (see Figure 1). We crosschecked each application scenario to confirm that it represented the core concept of the corresponding PBT or situation. We ensured that the same traits or situations were expressed uniformly in the provided illustrations and descriptions.

Figure 1. Cartoon-style illustrations for the survey.
We ran a set of pilot studies to optimize the duration of the survey. For greater accessibility, the survey site allowed access from any device via the responsive website (Fink, 2015). Respondents could stop and resume the surveys whenever they wanted.
Respondents indicated their preferences in 100 application scenarios using 5-point Likert scales (Figure 2). Respondents were also asked to assess the emotional quality and usefulness of each scenario. These scores were used to understand why a particular scenario was more preferred or less preferred. This allowed us to determine whether a scenario was welcomed because it was likely to be enjoyable or because it fulfilled a utilitarian function. After evaluating the application scenarios for a particular use case, respondents could move on to the next situation. The use cases were organized in the order of routine rental car use so that respondents would experience each scenario in a progressive sequence. At the end of each situation, participants were asked to select their favorite scenarios and explain why they preferred a particular application in the selected situation.
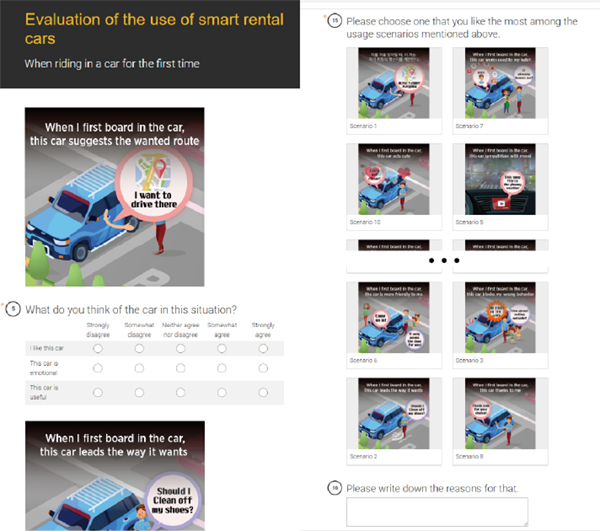
Figure 2. Responsive web-based survey interface for mobile, PC, or tablet PC.
We distributed the survey link through bulletin boards and the SNSs of universities and local communities. Respondents could voluntarily participate in the survey and there were no conditions in terms of driving experience, age, sex, or region. We collected demographic information at the start of the survey and notified participants that they would receive a $5 reward if they completed the survey (Simsek & Veiga, 2001).
Data Collection and Analysis
Participants took an average of 40 minutes to complete the online survey. A total of 155 respondents were recruited; 110 participants (female = 35.5%; male = 64.5%) provided complete responses and we removed duplicate responses. Participants were 18-65 years old (65% were 25-35). Participants reported varying levels of driving experience, from little experience to over 10 years (SD = 11.2); 47% reported over 10 years of driving experience. Most participants regularly drove alone (82.6%) and half had their own car (53%).
The ratings for each of the 100 scenarios were collected and scored. The scores were converted to average rating scores for statistical analysis (Norman, 2010). Aside from the average rating scores for preference (MAX = 4.54, MIN = 1.68), emotional quality (MAX = 4.18, MIN = 2.14) and usefulness (MAX = 4.62, MIN = 1.62), open-ended responses were also collected regarding which scenarios the respondents preferred the most and why such scenarios were preferred.
Using the average scores for preference, two-way repeated-measures ANOVA was performed with traits (10 levels) and situations (10 levels) as within-subject factors to assess global variance among all conditions. The preference scores for each application scenario were treated as dependent variables. The mean (M) and standard deviation (σ) values of the user responses were calculated for each condition. We conducted a post-hoc test of correspondence analysis (Tukey) to determine which types of pet-dog behavioral traits were most favored in various situations. Traits and situations were analyzed with regard to the influence of the rated preferences as within-subject variables. We also performed a correlation test to understand how much emotional quality and usefulness in smart car interactions correlated with participants’ preferences.
We performed qualitative analysis on the most preferred application scenarios and the corresponding open-ended responses. We examined the underlying meanings of the responses to find references associated with the core characteristics of PBTs or the respective use cases. This led us to richer interpretations of the underlying motivations when interpreting the statistical results.
Results
Figure 3 shows the average scores of the preference factors for each experimental condition in the 100 application scenarios (p = 0.000, < 0.05) from the ANOVA (Table 2). Tukey post-hoc tests revealed that the most preferred traits were personalization and care while trait inducement and interruption were the next most preferred. These were followed by loyalty, sympathy and suggestion. The appreciation, apology and emotional appeal traits were the least preferred. The Pearson correlation analysis showed that emotional quality and usefulness were both strongly correlated with preference scores [F(2,11385) = 21745.12, p < 0.05, adjusted R2 = .792, (using the Enter method)]. Following conventional interpretation standards (Coolican, 2017), usefulness was a very strong predictor (r = .876) and emotional quality was a strong predictor (r = .636), indicating that these aspects highly affected preferences in the application scenarios.
Table 2. ANOVA results.
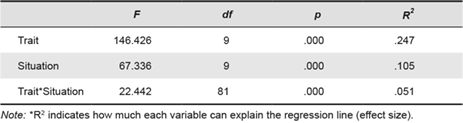
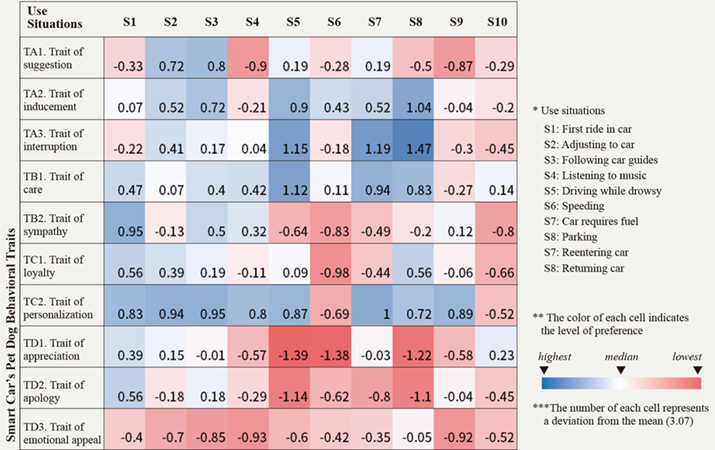
Figure 3. Distribution of average preference scores for each application scenario (p < .05).
The analysis indicated which types of pet-dog behavioral traits (PBT) were preferred according to the situation. It also revealed why a particular application scenario was preferred by referring to the reported motivations. Figure 4 provides an overview of the preferred driving situations for each PBT (top 30% application scenarios). Details on the preference-score relationships between traits and use cases are provided below.
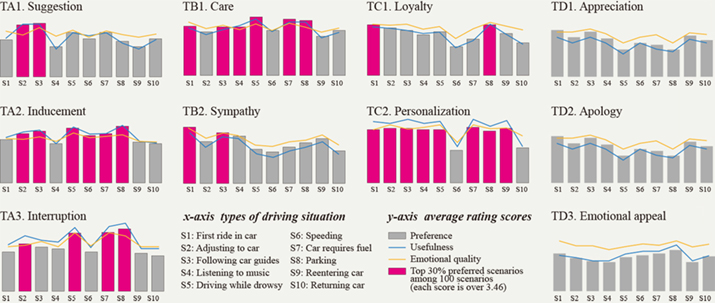
Figure 4. Average scores for preference, emotional quality and usefulness in each application scenario.
Trait Self-Expression (TA)
Trait self-expression was mostly preferred when providing novel guiding information to the driver and in situations requiring action by the driver.
Suggestion (TA1)
TA1 was welcomed when it was applied to the guidance situation where drivers required information and the car presented useful information in a timely manner. The most welcomed application scenarios were when the smart car presented useful tips (S2, top 17%; score: 3.79) and suggested scenic spots nearby (S3, top 15%; score: 3.87). One respondent who liked this application scenario said this car would provide unanticipated pleasure. This trait was also preferred in situations where minor measurements were needed and the car would lightly prompt the driver. Other high-scoring application scenarios commonly involved the smart car suggesting necessary behaviors to the driver in various contexts such as when the driver is drowsy (S5) or when fuel is low (S7).
Inducement (TA2)
This trait was welcomed when applied to situations where a smart car required more essential actions from drivers, such that the car prompted driver action in a smooth and courteous way. Examples included pointing out the presence of a speed camera to induce the driver to slow down (S6, top 26%, score: 3.5) or instigating the driver to perform an appropriate defensive action where risk may be present (S8, top 4%, score: 4.11).
Interruption (TA3)
This trait was welcomed in hazardous or avoidable situations. The application scenario where the smart car wakes up a drowsy driver was highly preferred (S5, top 2%; score: 4.22). The two most preferred application scenarios involved keeping the driver from making mistakes such as putting in the wrong oil (S7, score: 4.54) or leaving the door open (S8, score: 4.26).
Trait Empathy (TB)
In terms of trait empathy, care (TB1) was preferred in situations where the driver was in a negative mood or unpleasant environment. Sympathy (TB2) was preferred in relatively casual or entertainment-related situations. The results indicated that empathy traits can be used to improve the quality of driving experience in different ways by providing pleasurable experiences.
Care (TB1)
This was welcomed in situations where the driver was in a mentally or physically vulnerable condition that threatened driving safety and the smart car substantially alleviated it. Highly preferred application scenarios included reducing volume so the driver could concentrate on driving (S4, top 27%; score: 3.49), ventilating the car when drowsiness occurred (S5, top 3%; score: 4.1) and showing concern for a driver’s agitated mood when speeding (S6, score: 3.18). This trait was also preferred when a driver was uncomfortable or in an unpleasant environment and the car could help solve the problem. Participants preferred this trait to help avoid oil stenches in gas stations (S7, top 8%; score: 4.01) and to ensure visibility in parking lots (S8, top 13%; score: 3.9). Participants reported that application scenarios where the smart car helped alleviate the driver’s discomfort were more useful and evaluated them as more preferable. This probably explains why S9 was not welcomed (lowest 38%; score: 2.8) despite the fact that it portrays a problematic situation. This was likely because in this application scenario, the smart car was simply concerned with the drivers’ feelings while in other scenarios the smart car provided suggestions that could be real solutions.
Sympathy (TB2)
This was mostly welcomed when applied to the first riding or reentering situations and the smart car extended a simple greeting to the driver. The most preferred application scenarios depicted a smart car that understood the driver’s mood during the initial drive (S1, top 6%; score: 4.02) or when the driver returned to the car to drive again (S9, score: 3.19). This trait was also welcomed when applied to entertainment situations such as playing music and unexpectedly suggesting new content. For example, when a smart car recommended listening to music appropriate to the weather (S3, score: 3.57; S4, score: 3.39), it was highly welcomed. One respondent answered, “If my car grasps the atmosphere, I will be impressed.” The results indicated this trait was commonly felt as very emotional. Participants felt more comfortable when this was trait was used by smart cars responding to casual and less personal information (e.g., weather) rather than the driver’s private feelings. For a smart car to express sympathy in every driving situation could be rather uncomfortable.
Trait Faithfulness (TC)
In terms of trait faithfulness, trait personalization (TC2) was the most preferred among all traits. Trait loyalty (TC1) was not liked as much but still showed relatively high preference. Trait faithfulness was shown to be conducive to promoting both emotional and useful aspects of smart cars. This result might be because such interactions comprised personal elements. Loyalty was preferred when a driver was entering the car while personalization was more preferred in situations where a driver required various information to support decision making.
Loyalty (TC1)
The most preferred application scenarios were related to boarding situations for this trait. In the first riding scenario (S1), where a smart car provides special features (opens the door) only for the driver, the preference score of this application scenario was 3.63–among the top 20%. Participants considered a smart car that employed this trait as very emotional. They expected feelings such as being welcomed, being able to show off or having a sense of ownership.
Personalization (TC2)
This trait was welcomed in most situations. In eight of the 10 application scenarios, this trait was included in the top 30%. The most welcomed application scenarios were those in which the driver had various things to consider in making a decision and the car provided suitable guidance. For example, participants liked it when the car guided the driver to a familiar road (S3, score: 4.02), selected music the driver might like (S4, score: 3.87) or guided the driver on the road in accordance with the driver’s schedule (S9, score: 3.96).
Participants said these application scenarios were useful because the smart car could reduce difficulties produced by complicated choices and give drivers what they truly needed based on their habits and tastes. Participants emphasized that this was the most important reason why the trait was useful. Reponses indicated that if a smart car with this trait did not offer any practical content that was appropriate for users, drivers might be repelled, feeling their privacy had been violated.
Trait Innocence (TD)
Trait innocence was relatively less welcomed in most situations, as indicated by the Tukey test results. However, there were some prominently preferred application scenarios for each trait. Appreciation (TD1) was mostly welcomed when driving was completed or a driver was completing an action. Apology (TD2) was welcomed where a smart car might cause discomfort to the driver and emotional appeal (TD3) was preferred where the smart car required the driver’s action. All preferred application scenarios were highly evaluated for their emotional quality.
Appreciation (TD1)
This trait was preferred when first entering and exiting the car (S1 and S10, scores ranked around the top 30%), as well as when the driver refueled the car (S7). A respondent answered, “If a smart car shows fancy greetings, it is worth the price of oil!”
Apology (TD2)
This was preferred when a smart car might have caused discomfort and it asked to be excused. Welcomed situations included when the smart car warned the driver about a potential inconvenience (S1, score: 3.63), when the car asked for understanding about the functioning of an unstable sensor caused by bad weather (S3, score: 3.25) and when the car told the driver the seat was too hot to sit in (S9, score: 3.03). Participants said these scenarios were emotional because the car helped them to take on a more relaxed mood and be generous by anticipating possible unpleasantness. In particular, it was more preferred when the car substantially helped the driver deal with a situation in advance as well as acknowledged an uncomfortable circumstance. Apologies for inconveniences already experienced were less welcomed. For example, in application scenarios when it was impossible for the driver to react in advance, it was also relatively less welcomed, despite the smart car noticing the inconvenience (S2, score: 2.89).
Emotional Appeal (TD3)
This trait was welcomed in situations where the smart car required action and told the driver what it needed. Examples included the smart car making frightened expressions to encourage the driver not to speed (S6) or showing fearful face when security might be threatened by a stranger while parking (S8). These application scenarios appealed to drivers to take action by expressing anthropomorphized emotions such as fear or fright. It was less preferred for cars to act cute or show intimate reactions when driver assistance was not required.
Discussion
PBT’s Application to Interaction Design in Smart Car Use
Self-expression (TA) varied in the degree of intervention according to user behavior. TA can be used according to the urgency of the situation. Trait suggestion (TA1) would be appropriate for recommending behavior in low-urgency situations, such as the need for a car wash or an inspection. Trait inducement (TA2) can be applied in situations where it is imperative to take action but is not an emergency. TA2 can gently lead a driver toward correct action that the driver is reluctant to do. A smart car can induce a driver to fasten the seatbelt or slow down by emphasizing the disadvantages or annoying the driver. Trait interruption (TA3) is appropriate in emergency situations where the driver must act correctly. For example, if a drunk driver attempts to start the car, the start-up button can be concealed).
Empathy (TB) can be used in situations where smart cars actively or passively provide feedback according to the driver’s emotional state. Trait care (TB1) would be appropriate when applied to situations where the driver is in an emotionally unstable state or uncomfortable environment. A smart car might encourage a nervous driver and guide the way in more detail. Trait sympathy (TB2) can be applied in a light and positive situation to soften the atmosphere. For example, a smart car can play background music that matches the surroundings and enriches the trip.
Faithfulness (TC) may be applicable in situations where personalized services are utilized. Trait loyalty (TC1) would be appropriate in casual and light situations, such as events that are gratifying and behavior that is specifically tailored to the owner. A smart car would remember passengers who board frequently and play songs they listen to while together. Trait personalization (TC2) can be utilized when providing convenient information that reflects personal information. For example, the smart car could present suitable alternatives when a driver needs to make a decision or it could automatically determine and execute the optimal option. It could only narrow the options and let the driver make the final choice.
Innocence (TD) can be used for amusing interactions. Trait appreciation (TD1) can be effectively utilized to strengthen users’ efforts. Trait apology (TD2) would be appropriate when inconveniences are expected due to environmental changes or compromised car function so the driver can prepare. Trait emotional appeal (TD3) can help to smoothly induce driver behavior in possibly difficult situations that require action from the driver such as when expenditure or arduous behavior are needed. It can also help to quickly and reliably deliver necessary actions in situations where the driver’s safety may be compromised. TD3 can draw attention to the driver and deliver the message in a more intuitive way.
When all PBTs were applied to smart cars, they were particularly welcomed by participants when they involved useful, fun or playful interactions. Participants felt uncomfortable with smart cars’ access to private information when personal information was not utilized for useful interactions. Overusing playful interactions without practical merit can make drivers feel that the interactions are burdensome and interfere with driving.
PBT’s Application to Driving Situations as a Function of Autonomy
A smart car requires various levels of autonomous interaction depending on the use case (Moite, 1992; Rödel et al., 2014). We showed that PBT can be divided into three levels of autonomy. Elaborated in Figure 5 are PBT’s autonomy levels based on activeness, whether a system operates independently of the user or operates at the user’s request (Parasuraman et al., 2000; Parasuraman & Riley, 1997) and controllability, whether it directly affects user behavior or indirectly affects it through motivation (Blumberg & Galyean, 1995). Deepening prior findings, we proposed appropriate PBT use according to three levels of autonomy in smart car interactions.
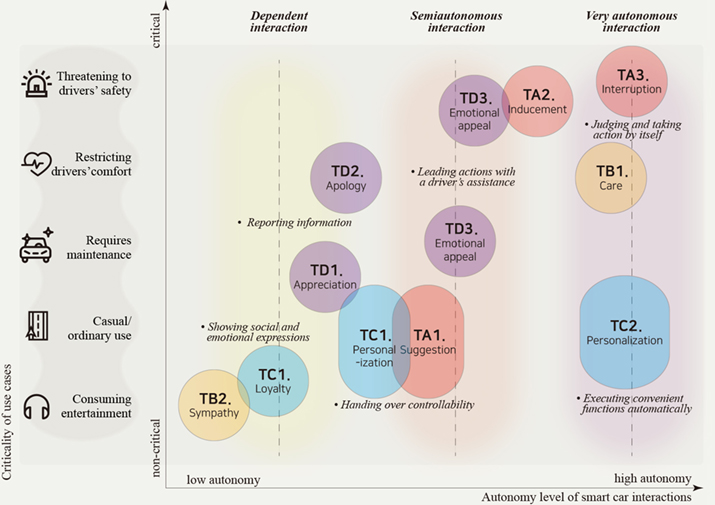
Figure 5. PBT’s application in driving situations according to the autonomy level.
Figure 5 shows the desired relationship between the autonomy level of PBT and the types of driving situations depending on the degree of criticality. Highly autonomous traits would be appropriate in critical situations to prevent incorrect driver behavior or to protect the driver. Convenient functions can also be provided automatically, such as automatic seat adjustment. Semiautonomous traits that would involve driver action could include suggesting alternative routes in a traffic jam, which the driver could ignore or accept. Dependent traits are adequate in situations where the smart car simply reports what has happened. Subsequent judgments and action could be entirely up to the driver. These can be used to express social and emotional feedback to increase user enjoyment. For example, the car could provide greetings according to the driver’s mood or the weather.
Figure 5 implies that the autonomy level of PBT positively correlates with the urgency of the situation. The more urgent the situation and the required action, the more effective high-autonomy PBT will be. Meanwhile, low-autonomy PBT is appropriate in noncritical situations. To ensure ideal interaction with a smart car, drivers should accept the occasional autonomy of the car and relinquish a part of driving control timely (Rödel et al., 2014). PBT could support this transition by creating interactions that reflect various levels of autonomy in accordance with different degrees of situational urgency.
How PBT Can Enhance Emotional Smart Car User Experience?
The findings of Study 2 suggest that smart cars with PBT could support intimate interactions with users that produce emotional experiences in four ways. Firstly, PBT can make unwilling interactions acceptable and favorable by communicating with drivers in indirect ways. Secondly, PBT can enhance emotional bonding with a car through mutually beneficial interactions. Dog owners are assisted by their dogs while also expending effort on their dogs, which is an important way of building emotional rapport (Dotson & Hyatt, 2008; Sanders, 1993). The continuous experience of reciprocal interaction can foster and develop affection and intimacy with a smart car. Thirdly, PBT can provide delightful experiences in terms of proactive and lifelike interactions. When a car recommends new content or conveys information exhibiting free will or emotion, users can derive pleasure from this rich, dynamic and unexpected experience. Lastly, PBT can enhance emotional satisfaction by inducing low expectations and generous attitudes toward a smart car. Given that challenges for smart cars arise from dissatisfaction with smart car abilities conflicting user expectations and the deterioration of user skill (Casner et al., 2016), PBT requiring the owner’s care can contribute to the emotional satisfaction of using smart cars by arousing responsible and benevolent attitudes. Prolonged intimate interactions with smart cars that are emotional agents can enhance user satisfaction.
Limitations and Future Work
Regarding the interviews, given the recruiting methods and locality, the results might reflect participants’ tendency to have more positive feelings for their pet dogs or to overestimate the dogs. PBT might not generate an affective experience to the same degree in other groups. Users who love animals or cute things would appreciate petmorphic interactions more. The survey findings, performed regardless of whether raising a dog or not, support to some extent this understanding. Trait innocence was generally less welcomed and its emotional quality was higher than its usefulness. Otherwise, personalization, the most widely welcomed, showed a higher usefulness score than the emotional one. It was assumed that the emotional PBT generally did not gain high scores due to participants’ different preference for dogs. As such, the range of PBT applications might depend more on the design context or target user. As for non-dog owners, the trait of high usefulness can be more applicable. In addition, by considering our suggestions on the appropriate application correlation, it will be possible to design interactions that can be agreeable to both dog owners and non-owners.
In terms of the survey, the driving situations were confined to the context of short-term rental car use. Despite various aspects of use cases, this does not cover all potential use contexts of smart cars. To generalize the findings, further research might be needed that applies PBT to private smart car use. It is also possible to consider user attitudes changing over time or reflecting individual characteristics when applying PBT in private use contexts. Moreover, the survey was based on imagined scenarios and not real situations. To mitigate this weakness, we selected a concrete context (rental car use). There is, however, the possibility that factors aside from the particular circumstances of each scenario affected participants’ evaluations. To address this, we provided illustrations to help participants clearly understand the application scenarios. We considered this possible limitation when analyzing the results and excluded some cases where participants did not properly understand the application scenario. In future work, we will conduct further empirical studies or interviews on some of the preferred application scenarios.
Due to the limited sample size, we did not account for differences in participant demographics or driving experience. Thus, there is room for future research to discover meaningful differences in terms of user characteristics such as gender or driving experience.
In this study, we demonstrated petmorphic behavioral traits attributed to pet dogs. One of our findings showed that participants anticipated the petmorphic agent not working entirely by itself and requiring the owner’s care. It can be seen that petmorphic cars are associated with low expectations in terms of intelligence. This interpretation aligns with the smart-but-dumb feature that characterizes pet-like smart products (Row & Nam, 2014). Given that zoomorphic products might lead to overestimation on functionalities and even safety-critical issues (Bartneck, Kulic, & Croft, 2008), we assume that different animal models will affect different aspects of the user interactions with smart products. Understanding the relationship between these variables and the smart product interactions, including users’ expectation, would be an interesting future research topic.
In future work, the design implications of PBT and its applications to driving situations can be further developed as assistive tools for design thinking. Follow-up studies are needed to see if these assistive tools are effective for the process of smart car interaction design. Future research could also apply PBT to smart car design to verify that it is useful for design practice. Smart car interaction prototyping will be required to understand the difficulties in applying PBT as an interaction. A systematic user study is also needed to substantively verify the effects of each trait on emotional experiences.
Conclusion
This study investigated using a petmorphic approach for designing intimate interactions in smart cars. This research makes three specific contributions. Firstly, we identified four types of pet-dog behavioral traits (PBT) that enhance users’ emotional experiences: self-expression, empathy, faithfulness and innocence. Secondly, we showed which smart car situations are most suited for the particular application of each PBT with the personalization trait being the most welcomed; this is particularly appropriate for providing optimal services reflecting personal information. Trait innocence was relatively less favored, though it can be used for amusing interactions. Thirdly, our discussion of the positive relationship between PBT autonomy levels and urgency levels in situations can guide designers on how to leverage PBT in design practice. We also discussed the potential of enhancing and increasing users’ emotional experiences with smart cars using PBT. This research can provide a new perspective on the intimate relationship between future smart cars and drivers in terms of how such interaction can take place.
PBT can be applied to human–machine interactions in numerous other smart products and systems that employ AI or a form of agency. We expect our understanding on petmorphic design and its adoption in smart car contexts can provide a useful approach for designing future smart products and systems to be more emotionally sensitive, natural and pleasurable in human–machine interactions.
References
- Arkin, R. C., Fujita, M., Takagi, T., & Hasegawa, R. (2003). An ethological and emotional basis for human–robot interaction. Robotics and Autonomous Systems, 42(3), 191-201.
- Aspling, F., Juhlin, O., & Väätäjä, H. (2018). Understanding animals. In Proceedings of the 10th Nordic Conference on Human-Computer Interaction (pp. 148-160). New York, NY: ACM. https://doi.org/10.1145/3240167.3240226
- Bartneck, C., Kulic, D., & Croft, E. (2008). Measuring the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. International Journal of Social Robotics, 1, 71-81.
- Blumberg, B. M., & Galyean, T. A. (1995). Multi-level direction of autonomous creatures for real-time virtual environments. In Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques (pp. 47-54). New York, NY: ACM. https://doi.org/10.1145/218380.218405
- Brandrick, C. (2012, April 23). Robot hitches ride in hybrid car, sets up camp on car dashboard. PCWorld. Retrieved from http://www.pcworld.com/article/254340/
- Braun, M., Schubert, J., Pfleging, B., Alt, F., Braun, M., Schubert, J., …Alt, F. (2019). Improving driver emotions with affective strategies. Multimodal Technologies and Interaction, 3(1), 21. https://doi.org/10.3390/mti3010021
- Braun, M., Weiser, S., Pfleging, B., & Alt, F. (2018). A comparison of emotion elicitation methods for affective driving studies. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 77-81). New York, NY: ACM. https://doi.org/10.1145/3239092.3265945
- Braun, V., & Clarke, V. (2006). Using thematic analysis in psychology. Qualitative Research in Psychology, 3(2), 77-101. https://doi.org/10.1191/1478088706qp063oa
- Burgess, M., King, N., Harris, M., & Lewis, E. (2013). Electric vehicle drivers’ reported interactions with the public: Driving stereotype change? Transportation Research Part F: Traffic Psychology and Behaviour, 17, 33-44. https://doi.org/10.1016/J.TRF.2012.09.003
- Casner, S. M., Hutchins, E. L., & Norman, D. (2016). The challenges of partially automated driving. Communications of the ACM, 59(5), 70-77. https://doi.org/10.1145/2830565
- Coolican, H. (2017). Research methods and statistics in psychology. New York, NY: Routledge. https://doi.org/10.4324/9780203769836
- De Graaf, M. M. A., & Allouch, S. Ben. (2017). The influence of prior expectations of a robot’s lifelikeness on users’ intentions to treat a zoomorphic robot as a companion. International Journal of Social Robotics, 9(1), 17-32. https://doi.org/10.1007/s12369-016-0340-4
- Dotson, M. J., & Hyatt, E. M. (2008). Understanding dog–Human companionship. Journal of Business Research, 61(5), 457-466. https://doi.org/10.1016/j.jbusres.2007.07.019
- Dula, C. S., & Geller, E. S. (2003). Risky, aggressive, or emotional driving: Addressing the need for consistent communication in research. Journal of Safety Research, 34(5), 559-566. https://doi.org/10.1016/j.jsr.2003.03.004
- Endenburg, N., & Bouw, J. (1994). Motives for acquiring companion animals. Journal of Economic Psychology, 15(1), 191-206.
- Finch, J. (1987). The vignette technique in survey research. Sociology, 21(1), 105-114. https://doi.org/10.1177/0038038587021001008
- Fink, A. (2015). How to conduct surveys: A step-by-step guide (6th ed.). Thousand Oaks, CA: Sage.
- Flemisch, F. O., Adams, C. A., Conway, S. R., Goodrich, K. H., Palmer, M. T., & Schutte, P. C. (2003). The h-metaphor as a guideline for vehicle automation and interaction. Hanover, MD: NASA Center for AeroSpace Information.
- Fogle, B. (1981). Interrelations between people and pets. Springfield, IL: C.C. Thomas.
- Fong, T., Nourbakhsh, I., & Dautenhahn, K. (2003). A survey of socially interactive robots. Robotics and Autonomous Systems, 42(3-4), 143-166. https://doi.org/10.1016/S0921-8890(02)00372-X
- Fujita, M. (2001). AIBO: Toward the era of digital creatures. The International Journal of Robotics Research, 20(10), 781-794.
- Gaunet, F. (2010). How do guide dogs and pet dogs (Canis familiaris) ask their owners for their toy and for playing? Animal Cognition, 13(2), 311-323. https://doi.org/10.1007/s10071-009-0279-z
- Gkouskos, D., & Chen, F. (2012). The use of affective interaction design in car user interfaces. Work, 41(1), 5057-5061. https://doi.org/10.3233/WOR-2012-0797-5057
- Gomez, R. E., Popovic, V., & Bucolo, S. (2008). Emotional driving experiences. In P. Desmet, J. van Erp, & M. Karlsson (Eds.), Design and emotion moves (pp. 141-164). Newcastle, UK: Cambridge Scholars.
- Goode, D. (2007). Playing with my dog Katie : An ethnomethodological study of dog-human interaction. West Lafayette, IN: Purdue University.
- Gruber, D., Aune, A., & Koutstaal, W. (2018). Can semi-anthropomorphism influence trust and compliance? In Proceedings of the Conference on Technology, Mind, and Society (pp. 1-6). New York, NY: ACM. https://doi.org/10.1145/3183654.3183700
- Healey, J. A., & Picard, R. W. (2005). Detecting stress during real-world driving tasks using physiological sensors. IEEE Transactions on Intelligent Transportation Systems, 6(2), 156-166. https://doi.org/10.1109/TITS.2005.848368
- Helmes, J., Hummels, C., & Sellen, A. (2009). The other brother: Re-experiencing spontaneous moments from domestic life. In Proceedings of the 3rd International Conference on Tangible and Embedded Interaction (pp. 233-240). New York, NY: ACM.
- Hernandez, J., McDuff, D., Benavides, X., Amores, J., Maes, P., & Picard, R. (2014). AutoEmotive: Bringing empathy to the driving experience to manage stress. In Proceedings of the Conference on Designing Interactive Systems (Companion Pub., pp. 53-56). New York, NY: ACM. https://doi.org/10.1145/2598784.2602780
- Hirschman, E. (1994). Consumers and their animal companions. Journal of Consumer Research, 20(4), 616-632.
- Hughes, R., & Huby, M. (2002). The application of vignettes in social and nursing research. Journal of Advanced Nursing, 37(4), 382-386. https://doi.org/10.1046/j.1365-2648.2002.02100.x
- Jacobsson, M., Ljungblad, S., Bodin, J., Knurek, J., & Holmquist, L. E. (2007). Glowbots: Robots that evolve relationships. In Proceedings of SIGGRAPH Conference on Emerging Technologies (No. 7-es). New York, NY: ACM. https://doi.org/10.1145/1278280.1278288
- Kifor, T., Gottdank, T., Hajnal, A., Baranyi, P., Korondi, B., & Korondi, P. (2011). Smartphone emotions based on human-dog interaction. In Proceedings of the 2nd International Conference on Cognitive Infocommunications (pp. 1-6). Piscataway Township, NJ: IEEE.
- Kim, Y. -K., Row, Y. -K., & Nam, T. -J. (2012). Knoby: Pet-like interactive door knob. In Proceedings of the Conference on Human Factors in Computing Systems (Ext. Abs., pp. 1685-1690). New York, NY: ACM.
- Kovács, B., Szayer, G., Tajti, F., Korondi, P., & Nagy, I. (2011). Robot with dog type behavior. In Proceedings of the 17th International Conference on Electrical Drives and Power Electronics (pp. 347-353). Poprad, Slovakia: Technical University of Kosice.
- Krippendorff, K. (2013). Content analysis: An introduction to its methodology. Thousand Oaks, CA: Sage.
- Lee, K. M., Peng, W., Jin, S. A., & Yan, C. (2006). Can robots manifest personality? An empirical test of personality recognition, social responses, and social presence in human-robot interaction. Journal of Communication, 56(4), 754-772. https://doi.org/10.1111/j.1460-2466.2006.00318.x
- Löffler, D., Kaul, A., & Hurtienne, J. (2017). Expected behavior and desired appearance of insect-like desk companions. In Proceedings of the 10th International Conference on Tangible, Embedded, and Embodied Interaction (pp. 289-297). New York, NY: ACM. https://doi.org/10.1145/3024969.3024992
- Marenko, B. (2014). Neo-animism and design: A new paradigm in object theory. Design and Culture, 6(2), 219-241. https://doi.org/10.2752/175470814X14031924627185
- Marenko, B., & van Allen, P. (2016). Animistic design: How to reimagine digital interaction between the human and the nonhuman. Digital Creativity, 27(1), 52-70. https://doi.org/10.1080/14626268.2016.1145127
- McVegh-Schultz, J., Stein, J., Boyle, J., Duff, E., Watson, J., Syam, A., … Fisher, S. (2012). Vehicular lifelogging: New contexts and methodologies for human-car interaction. In Proceedings of the Conference on Human Factors in Computing Systems (Ext. Abs., pp. 221-230). New York, NY: ACM. https://doi.org/10.1145/2212776.2212800
- Meschtscherjakov, A., Wilfinger, D., Gridling, N., Neureiter, Ka., & Tscheligi, M. (2011). Capture the car! Qualitative in-situ methods to grasp the automotive context. In Proceedings of the International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 105-112). New York, NY: ACM. https://doi.org/10.1145/2381416.2381434
- Moite, S. (1992). How smart can a car be? In Proceedings of the Intelligent Vehicles Symposium (pp. 277-279). Piscataway Township, NJ: IEEE. https://doi.org/10.1109/IVS.1992.252271
- Müller, L., Risto, M., & Emmenegger, C. (2016). The social behavior of autonomous vehicles. In Proceedings of the International Joint Conference on Pervasive and Ubiquitous Computing (Adjunct, pp. 686-689). New York, NY: ACM. https://doi.org/10.1145/2968219.2968561
- Neale, V. L., Klauer, S. G., Knipling, R. R., Dingus, T. A., Holbrook, G. T., & Petersen, A. (2002). The 100 car naturalistic driving study phase I – Experimental design (Tech. Rep. No. DOT HS 810 593). U. S. DOT, National Highway Traffic Safety Administration. https://doi.org/DOT HS 808 536
- Nguyen, H., & Kemp, C. C. (2008). Bio-inspired assistive robotics: Service dogs as a model for human-robot interaction and mobile manipulation. In Proceedings of the 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (pp. 542-549). Piscataway Township, NJ: IEEE. https://doi.org/10.1109/BIOROB.2008.4762910
- Nissan Motor Company Ltd. (2005). PIVO-kun: An in-car robotic assistant. Retrieved January 17, 2017, from http://www.nissan-global.com/EN/TECHNOLOGY/OVERVIEW/ri.html
- Norman, D. A. (2009). The design of future things. New York, NY: Basic books.
- Norman, G. (2010). Likert scales, levels of measurement and the “laws” of statistics. Advances in Health Sciences Education, 15(5), 625-632. https://doi.org/10.1007/s10459-010-9222-y
- Parasuraman, R., Sheridan, T. B., & Wickens, C. D. (2000). A model for types and levels of human interaction with automation. IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans, 30(3), 286-297. https://doi.org/10.1109/3468.844354
- Parasuraman, R., & Riley, V. (1997). Humans and automation: Use, misuse, disuse, abuse. Human Factors: The Journal of the Human Factors and Ergonomics Society, 39(2), 230-253. https://doi.org/10.1518/001872097778543886
- Patton, M. Q. (1990). Qualitative evaluation and research methods (2nd ed.). Thousand Oaks, CA: Sage.
- Perterer, N., Sundström, P., Meschtscherjakov, A., Wilfinger, D., & Tscheligi, M. (2013). Come drive with me: An ethnographic study of driver-passenger pairs to inform future in-car assistance. In Proceedings of the Conference on Computer Supported Cooperative Work (pp. 1539-1548). New York, NY: ACM. https://doi.org/10.1145/2441776.2441952
- Podberscek, A. L., Ann, Y. -G., Choi, G., Clutton-Brock, J., Cwiertka, K., Kum, K., … Tucker, D. (2009). Good to pet and eat: The keeping and consuming of dogs and cats in South Korea. Journal of Social Issues, 65(3), 615-632.
- Ramm, S. A. (2018). Naturalness framework for driver-car interaction. Retrieved from https://bura.brunel.ac.uk/handle/2438/15980
- Ramm, S., Giacomin, J., Robertson, D., & Malizia, A. (2014). A first approach to understanding and measuring naturalness in driver-car interaction. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 1-10). New York, NY: ACM. https://doi.org/10.1145/2667317.2667416
- Reeves, B., & Nass, C. (1996). How people treat computers, television, and new media like real people and places. Cambridge, UK: Cambridge university.
- Riener, A. (2012). Driver-vehicle confluence or how to control your car in future? In Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 217-224). New York, NY: ACM. https://doi.org/10.1145/2390256.2390293
- Rödel, C., Stadler, S., Meschtscherjakov, A., & Tscheligi, M. (2014). Towards autonomous cars: The effect of autonomy levels on acceptance and user experience. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 1-8). New York, NY: ACM. https://doi.org/10.1145/2667317.2667330
- Row, Y., & Nam, T. (2014). Camy: Applying a pet dog analogy to everyday ubicomp products. In Proceedings of the ACM International International Joint Conference on Pervasive and Ubiquitous Computing (pp. 63-74). New York, NY: ACM. https://doi.org/10.1145/2632048.2636075
- Saldien, J., Goris, K., Yilmazyildiz, S., Verhelst, W., & Lefeber, D. (2008). On the design of the huggable robot Probo. Journal of Physical Agents, 2(2), 3-11. https://doi.org/10.14198/JoPha.2008.2.2.02
- Sanders, C. R. (1993). Understanding dogs: Caretakers’ attributions of mindedness in canine-human relationships. Journal of Contemporary Ethnography, 22(2), 205-226. https://doi.org/10.1177/089124193022002003
- Sanders, E. B. -N., & Stappers, P. J. (2012). Convivial design toolbox: Generative research for the front end of design. Amsterdam, the Netherlands: BIS.
- Shapiro, K. J. (1990). Understanding dogs through kinesthetic empathy, social construction, and history. Anthrozoös, 3(3), 184-195. https://doi.org/10.2752/089279390787057540
- Sheller, M. (2004). Automotive emotions. Theory, Culture & Society, 21(4-5), 221-242. https://doi.org/10.1177/0263276404046068
- Simsek, Z., & Veiga, J. F. (2001). A primer on internet organizational surveys. Organizational Research Methods, 4(3), 218-235. https://doi.org/https://doi.org/10.1177/109442810143003
- Singh, A., & Young, J. E. (2013). A dog tail for utility robots: Exploring affective properties of tail movement. In P. Kotzé, G. Marsden, G. Lindgaard, J. Wesson, & M. Winckler (eds.), Proceedings of the Conference on Human-computer Interaction (pp. 403-419). Berlin, Germany: Springer. https://doi.org/10.1007/978-3-642-40480-1_27
- Smith, J., Bekker, H., & Cheater, F. (2011). Theoretical versus pragmatic design in qualitative research. Nurse Researcher, 18(2), 39-51. https://doi.org/10.7748/nr2011.01.18.2.39.c8283
- Steinberger, F., Schroeter, R., Foth, M., & Johnson, D. (2017). Designing gamified applications that make safe driving more engaging. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (pp. 2826-2839). New York, NY: ACM. https://doi.org/10.1145/3025453.3025511
- Sundström, P., Baumgartner, A., Beck, E., Döttlinger, C., Murer, M., Randelshofer, I., … Tscheligi, M. (2014). Gaming to sit safe. In Proceedings of the Conference on Designing Interactive Systems (pp. 715-724). New York, NY: ACM. https://doi.org/10.1145/2598510.2600882
- Sung, J.-Y., Guo, L., Grinter, R., & Christensen, H. (2007). “My roomba is rambo”: Intimate home appliances. In Proceedings of the 9th International Conference on Ubiquitous Computing (pp. 145-162). Berlin, Germany: Springer.
- Szabó, C., Róka, A., Gácsi, M., Miklósi, Á., Baranyi, P., & Korondi, P. (2010). An emotional engine model inspired by human-dog interaction. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (pp. 567-572). Piscataway Township, NJ: IEEE. https://doi.org/10.1109/ROBIO.2010.5723388
- Toto, S. (2010). Carnaby: Pioneer’s very special car navigation mini robot [videos]. Retrieved from https://techcrunch.com/2010/05/20/carnaby-pioneers-very-special-car-navigation-mini-robot-videos/
- Vanlaar, W., Simpson, H., Mayhew, D., & Robertson, R. (2008). Aggressive driving: A survey of attitudes, opinions and behaviors. Journal of Safety Research, 39(4), 375-381. https://doi.org/10.1016/J.JSR.2008.05.005
- Visser, F. S., Stappers, P. J., van der Lugt, R., & Sanders, E. B. -N. (2005). Contextmapping: Experiences from practice. CoDesign, 1(2), 119-149. https://doi.org/10.1080/15710880500135987
- Waytz, A., Heafner, J., & Epley, N. (2014). The mind in the machine: Anthropomorphism increases trust in an autonomous vehicle. Journal of Experimental Social Psychology, 52, 113-117. https://doi.org/10.1016/J.JESP.2014.01.005
- Williams, K., & Breazeal, C. (2013). Reducing driver task load and promoting sociability through an affective intelligent driving agent (AIDA). In P. Kotzé, G. Marsden, G. Lindgaard, J. Wesson, & M. Winckler (Eds.), Proceedings of the Conference on Human-computer Interaction (pp. 619-626). Berlin, Germany: Springer. https://doi.org/10.1007/978-3-642-40498-6_53
- Williams, K. J., Peters, J. C., & Breazeal, C. L. (2013). Towards leveraging the driver’s mobile device for an intelligent, sociable in-car robotic assistant. In Proceedings of IEEE Intelligent Vehicles Symposium (IV, pp. 369-376). Piscataway Township, NJ: IEEE.
