
Usability and Design Guidelines of Smart Canes for Users with Visual Impairments
Sung Yeon Kim and Kwangsu Cho *
Department of Interaction Science, Sungkyunkwan University, Seoul, Korea
A white cane is one of the most common mobility aids for the visually impaired. However, it does not help users with visual impairments find obstacles at head- or knee-level, or at distances greater than 1 m. To overcome these difficulties, smart canes with vibration alerts and an extended obstacle detection range have been introduced. However, several usability problems mean that users with visual impairments rarely adopt a smart cane. The goal of this study was to understand the potential for using a smart cane, along with the existing usability problems and then to develop design guidelines for improved smart canes. Both quantitative and qualitative methods were used to address these goals. A quantitative evaluation was performed of users with visual impairments using a prototype smart cane. Then, in-depth interviews of cane users were conducted. The results showed that a smart cane was more effective in avoiding obstacles than a white cane, but there were several potential usability problems. On the basis of the results, design guidelines for a smart cane prototype were devised.
Keywords – Design Guidelines, Mobility Aids, Smart Cane, Usability, Users with Visual Impairments, White Cane.
Relevance to Design Practice – One of the most severe difficulties faced by individuals with visual impairments is safe independent mobility. This paper addresses ways for improving the smart cane by examining the process by which users perform a mobility task using assistive aids.
Citation: Kim, S. Y., & Cho, K. (2013). Usability and design guidelines of smart canes for users with visual impairments. International Journal of Design, 7(1), 99-110.
Received May 5, 2012; Accepted February 6, 2013; Published April 30, 2013.
Copyright: © 2013 Kim & Cho. Copyright for this article is retained by the authors, with first publication rights granted to the International Journal of Design. All journal content, except where otherwise noted, is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 2.5 License. By virtue of their appearance in this open-access journal, articles are free to use, with proper attribution, in educational and other non-commercial settings.
*Corresponding Author: kwangsu.cho@gmail.com
Sung Yeon Kim is an adjunct professor in the Department of Product Design at Hongik University. She received her B.S. (1997), M.A. (1998), and M.P.S. (2005) in communication studies, graphic communication mgmt. & tech., interactive telecommunications from New York University, respectively, and Ph.D. (2012) in interaction science from Sungkyunkwan University. Her research interests include design for User Interface Design, Usability, Universal Design, Human Factors, and Human-Computer Interaction (HCI). She was previously a full-time professor of the Yong-in Songdam College (2000-2003) and an adjunct professor of Hongik University (2007-2009). She has also been working as a product manager (2006-present).
Kwangsu Cho is an associate professor in the Department of Interaction Science, the director of Interaction Science Institute and the general director of UX Academy, Sungkyunkwan University (SKKU), Seoul, Republic of Korea. He received his Ph.D. in cognitive science from the University of Pittsburgh, PA, USA. He has a wide range of research and development interests including human-computer interaction, multimodal user interfaces and experiences, human-robot interaction, accessibility and universal design for people with physical and mental impairments, and cognitive learning. He received a best researcher award of the year 2010-2011 from SKKU and was selected in 2013 as one of Donga Newspaper’s 100 influential people in future Korea. He has served as chairperson on several national committees in Korea including in user experiences and service sciences. He has also served as an editor of HCI Trends published by the Korean HCI Society and as an editorial board member of the Journal of Educational Psychology.
Introduction
The percentage of the population with visual impairments is increasing rapidly. Every year, the number of visually impaired people grows by up to 2 million worldwide. The World Health Organization (WHO, 2011) estimates that there are 39 million blind people and 246 million visually impaired people internationally. In addition, visual impairments are closely associated with aging. About 65% of the visually impaired are 50 years of age or older, with about 20% of the world’s population in this age group (WHO, 2011). In Europe, in particular, about 90% of visually impaired and partially sighted people are over the age of 60.
One of the most severe difficulties for the visually impaired is safe independent mobility. Having independent mobility is a significant factor in ensuring that this aging group can perform simple daily tasks without depending on others. Clark-Carter (1985) indicates that visually impaired people have a low level of mobility. Further, a recent survey in France revealed that only 2% of the overall visually impaired population uses mobility aids (Sander, Lelievre, & Tallec, 2005). One model of an independent mobility aid for the visually impaired is the traditional white cane, which is inexpensive, lightweight and foldable. Unfortunately, white cane users have difficulty detecting protruding bars or moving vehicles until they are dangerously close, which can lead to collisions and falls. The limited capability of the white cane corresponds to its length and a user’s maneuvering skills. As such, users rarely detect overhanging obstacles at head-level or ranges further than approximately 1 m from the user. Manduchi and Kurniawan (2011) report in a recent survey of 300 visually impaired people that over 40% of the respondents experienced head-level accidents at least once a month. Further, Clark-Carter (1985) found that visually impaired people were shown to be potentially dangerous when using a white cane.
To address these difficulties, many “smart” products for the visually impaired have been introduced in the last four decades, including smart canes and handheld or wearable devices that are equipped with a sensor system. A smart cane offers an improvement over a traditional white cane because it has the ability to detect objects above the cane and up to a range of 2 m away using an ultrasonic sensor. A white cane allows objects to be sensed through touch and echolocation from tapping. A smart cane has the same capabilities, except that it uses vibrotactile information and produces vibration alerts for obstacles in front of the user.
However, these smart products have not been successfully adopted and used by a large number of visually impaired people (Roentgen, Gelderblom, Soede, & de Witte, 2008). Several researchers have attributed this limited use to high prices (Abdel-Wahab & El-Masry, 2011; Mau, Melchior, Makatchev, & Steinfeld, 2008), or poor user interface and design (Lacey, Dawson-Howe, & Vernon, 1995). In addition, using quantitative measures (Manduchi et al., 2010), studies have examined the usability of smart mobility devices based on technical systems (Garg et al., 2007; Yen, 1996), addressing issues related to orientation, navigation, safety, mobility, speed and the optimization of techniques. Despite efforts to design a better electronic mobility aid over the past 40 years replacing the traditional white cane with a more functional option has been unsuccessful. Roentgen et al. (2008) argue that the available electronic mobility aids still do not fully meet the needs of the visually impaired.
The goal of this research was to identify the needs of visually impaired users and generate design guidelines for smart canes for users with visual impairments. We sought to identify the most crucial categories of design issues for smart canes by considering cognitive and functional capabilities, as described later. The study used performance tasks and interviews as the basis for the design guidelines for the smart cane, which revealed the areas that need improvement with regard to their primary function. Few studies have adopted both quantitative and qualitative methods to understand the usability and effectiveness issues of electronic mobility aids. To obtain effective results, it is important to integrate multiple methods in the smart cane design. Using a multi-method approach to design a functional smart cane will help identify potential problems as it allows one method to complement the other. That is, quantitative method might produce objective and reliable data through the performance of a task, while qualitative method provides insight into the user’s perspectives through the detailed data produced from in-depth interviews. In this way, the compiled results and data reflect a more comprehensive examination of preferences, needs and issues.
Literature Review
Safe, independent mobility when performing everyday tasks is one of the greatest challenges faced by the visually impaired. Even though the number of visually impaired people is increasing with the ageing of populations, as stated above, attempts to promote independent mobility have been unsuccessful. It is thus crucial to completely understand the needs and requirements of the visually impaired before attempting to create new devices. First, we analyzed the problems with a white cane and then identified the typical solutions provided by the existing electronic canes. Next, the research attempted to determine new, serious usability problems based on the typical electronic cane.
Problems with White Cane
The white cane was introduced in the 1940s and is the most common mobility aid for the visually impaired with about 130,000 users in the US (Leonard, 2002). It allows the detection of obstacles in front of a user within 1 m. Users typically tap the cane in an arc from left to right as far ahead as the cane’s length. This tapping provides rich information about the surface and slope of the ground in the user’s environment (Collins, 1984). However, there are several problems with a white cane, such as those in terms of detection and usability.
First, we investigated the problem with the detection range, which is limited to less than two paces (Dowling, 2007) and generally allows the detection of obstacles only at a distance equal to the cane’s length (Jacquet, Bellik, & Bourda, 2006). This short detection range interferes with the user’s walking speed, because it does not allow the user to confidently assess approaching obstacles outside this range. Thus, users are required to concentrate and check obstacles because they are not able to anticipate obstacles at distances greater than two paces (Hatwell, Streri, & Gentaz, 2003). This conscious effort reduces walking speed (Ulrich & Borenstein, 2001). In addition, Clark-Carter (1985) indicates that walking speed can be affected by the extent of preview information. Indeed, an investigation of the walking speed of visually impaired people (Clark-Carter, Heyes, & Howarth, 1986) showed that extending the preview information (3.5 m) using a Sonic Pathsounder (Kay, 1974) increased their walking speed by 18% as compared with their walking speed using a white cane. This accounts for an increased level of confidence; the greater confidence the user has, the closer they walk to their preferred speed. Manduchi et al. (2010) support the concept that walking speed depends on how confidently and efficiently a user walks. Thus, walking speed could be used as a measure of the user’s confidence and is increased by extending the preview information (Clark-Carter et al., 1986).
Decreasing unintended contacts with obstacles has also been associated with an increase in walking speed (Hartong, Jorritsma, Neve, Melis-Dankers, & Kooijman, 2004). A lack of preview information with little warning (i.e., a limited range of detection) reduces walking speed (Levesque, 2005) and also leads to the potential danger (Clark-Carter, 1985) of collisions and falling from contacting unintended obstacles. Generally, a count of mobility incidents is defined as the number of contacts with obstacles (Dowling, Boles, & Maeder, 2005). Manduchi and Kurniawan (2011) reported that over 50% of 289 blind and legally blind participants in a survey experienced fall accidents at least once a year, while 36% of the respondents stated that accidents resulting in falls had medical consequences. Further, the most dangerous situations for visually impaired people involve fast moving obstacles (Pelli, 1986). A detection range of only 1 m is very close for the detection of fast moving objects because it does not provide the user with sufficient reaction time (Singh et al., 2010); cane users require fast reaction times because of this limited detection range (Dowling, 2007).
Next, the detection areas covered when using a white cane can pose another problem from a usability perspective. Because a white cane does not detect upper-body level obstacles, users are prone to hazards involving increased risks of falls and collisions. In light of these circumstances, as previously noted, visually impaired people with white canes experience accidents involving head-level obstacles (Manduchi & Kurniawan, 2011). It is crucial for the safety of visually impaired users to provide some means of obstacle detection above knee-level and in an extended range (Kanagaratnam, 2009).
In particular, the majority of elderly people with visual impairments show that their judgment in relation to moving obstacles has undergone a gradual deterioration because of their age (Rubin & Salive, 1995), which leads to decreased performance with aging (Czaja & Sharit, 1998). On the basis of this evidence, visually impaired elderly users can find it difficult to thoroughly check for obstacles by tapping the ground. Further, this requires continuous tapping and they easily become tired from these repeated arm movements (Dowling, 2007), fatigue occurring far more quickly (Lacey et al., 1995) than for younger users. Finally, response speed is inversely correlated with age (Birren, Woods, & Williams, 1980). Thus, it is more difficult for elderly people to avoid fast moving obstacles because this requires a fast reaction time. In sum, a white cane might lead to an increased danger of collision and a higher expenditure of energy and time.
Typical Solutions Using Smart Cane
Electronic mobility aids for the visually impaired have flourished in an attempt to solve the above problems with the white cane. In this study, we analyzed 12 existing smart canes to identify typical solutions to these problems, focusing on obstacle detection abilities. The selection was based on Roentgen et al. (2008), who reviewed 146 electronic mobility aids. Among the 146 systems, first we identified 21 devices that are currently available, whereas all the others disappeared from the market. Out of the 21 devices, we selected the 12 devices that supported obstacle detection, discounting the other nine aids that did not have the function.
We firstly analyzed the shape of the selected electronic aids. Out of the 12 aids, six were canes and the rest were handheld (e.g., clipped onto a belt or worn on the palm) or wearable devices (e.g., head mounted or worn around the neck). For this study, we did not focus on the handheld aids, as our goal was to improve the smart cane devices. These six smart canes came in two forms. In the first type, a detection device is mounted on the cane to form a stick, making this a detachable unit, for example, the BAT “K” Sonar (Bay Advanced Technologies [BAT], n.d.), Teletact (Damachini et al., 2005), Tom-Pouce (Farcy et al., 2003; Farcy, Leroux, Jucha, Damaschini, Gregoire, & Zogaghi, 2006), Vistac Laser Long Cane (Vistac, n.d.) and UltraCane (Sound Foresight, n.d.). In the second type, the devices have detection sensors built into the canes. Canes such as the LaserCane are of this type.
Next, we examined how well the existing mobility aids address the outlined problems and found that a smart cane typically provides elderly users with unique functionalities. As for the obstacle detection problems, smart canes such as the UltraCane or BAT “K” Sonar, typically use ultrasonic sensors, infrared sensors (e.g., Tom-Pouce), or laser sensors (e.g., LaserCane, Teletac, or Vistac Laser Long Cane). These electronic sensors may drastically improve the detection range and angle problems, as well as avoid the nuisance of continuous tapping.
The typical electronic cane uses sensors to acquire information about the environment around the user, which enables the detection of obstacles above knee-level and in an extended range, a function that can be accomplished by attaching ultrasonic, laser, or infrared sensors (Kanagaratnam, 2009). For example, a typical cane like UltraCane (known as BATCane) detects obstacles up to head-level and at long distances using ultrasonic sensors, while canes like the Laser Long Cane use three laser beams to detect head-level obstacles (Manduchi & Coughlan, 2012). The Tom-Pouce emits infrared beams that allow the detection of head-level obstacles (Damaschini, Legras, Leroux, & Farcy, 2005). All three types of canes alert the user to the presence of an obstacle at a certain distance and up to head-level through a vibration alert, but they use different types of sensors.
Further, both infrared and ultrasonic sensors usually detect obstacles within a wide range around 30° above the ground (Jacquet, Bourda, & Bellik, 2004). The sensors may address the continuous tapping issue. To scan an area in front of them, a user should constantly move a laser cane from side to side due to the detection of narrow ranges. In contrast, a user does not need continuous tapping with an infrared or ultrasonic cane because it can detect a wide range. Infrared sensors, which use infrared light to determine the distance to a reflected object, are known to be disturbed by sunlight and dark objects and do not work accurately outdoors (Kanagaratnam, 2009). Ultrasonic sensors, which use sound instead of light, can be used outside in sunlight and are less affected by target materials (Eric, 2008). As such, most smart canes are equipped with ultrasonic sonar devices (Damaschini et al., 2005) because these pose the least limitations.
After sensing objects, a smart cane typically generates data to alert the user of upcoming obstacles. The data is then fed to the user, typically using a tactile feedback modality; 9 of the 12 electronic aids emit vibration alerts rather than audio signals (e.g., multiples tones corresponding to distances, or spoken messages such as “stop”). For instance, UltraCane uses vibrating pads on the handle of the cane. The vibrotactile stimulus is detected when the amplitude exceeds a certain threshold. This detection threshold (DT) is dependent on the frequency or location on the body. That is, the skin is roughly sensitive to vibrations between 20 and 500 Hz, and the DT for the trunk is only 4 μm at 200 Hz (Sherrick & Cholewiak, 1986). The DTs for the fingers and hands are considerably lower, which may offer advantages related to power consumption (van Erp, 2003). Thus, smart canes generally use vibrotactile feedback, which can be a useful device for users with visual impairments.
All the above approaches were expected to improve the existing problems with white canes and help improve visually impaired users’ walking speed, and fall and obstacle avoidance. For example, smart canes usually provide advance vibration alerts using ultrasonic sensors that can detect obstacles at around 30° for a wide range, at a distance of over 2 m and above-knee level. This provides extra time to prepare to avoid obstacles with confidence and this extended obstacle detection range eliminates the need for continuous tapping. Moreover, white cane users should not face a significant challenge when switching to a smart cane because of the similarities between white and smart canes.
Usability Problems with Smart Canes
As mentioned earlier, smart canes introduced new, serious usability problems (Abdel-Wahab & El-Masry, 2011; Garg et al., 2007, Lacey et al., 1995; Manduchi et al., 2010; Mau et al., 2008; Roentgen et al., 2008; Yen, 1996). A challenging problem is powering the device A typical electronic cane requires batteries; for example, BAT “K” Sonar requires a rechargeable battery and LaserCane, UltraCane, and Vistac Laser Long Cane require two AA rechargeable batteries. These batteries, especially in the Vistac Laser Long Cane, provide only four hours of continuous use. This may pose serious usability problems when users find themselves in situations requiring prolonged use of their mobility aid.
Next, the speed of the alerts can pose a problem. The time it takes to send a signal to the user once an obstacle is detected may be a significant factor for users when selecting a device as faster response times allow for further safety (Muhammad, Khan, Azhar, Masood, & Bakhshi, 2010). For tactile feedback, the sensor can detect people or objects moving as slow as 5–10 km/h, as well as vehicles traveling as fast as 20 km/h. Speeds higher than 20 km/h do not give the user enough time to react to the alert, which require 215 ms to react. Objects moving faster than 20 km/h are too fast for the sensor to both detect and alert the user in sufficient time. Though the sensor can be adjusted to detect speeds up to 100 km/h, it would be a waste of the battery as the user would not be able to move out of the way of the approaching object in time (Kanagaratnam, 2009). Reaction times also become slower after the late twenties (Welford, 1980) and the recognition of stimuli deteriorates even more with aging (MacDonald, Nyberg, Sandblom, Fischer, & Backman, 2008).
According to the National Association for the Blind (NAB), the angle that the cane makes with the ground varies between 50° and 60°. Consequently, the detection sensor is directed upward and can detect obstacles above knee-level. Though smart canes can detect obstacles above knee-level, users must tap on the ground to detect obstacles on the floor, as with the white cane. In sum, the following three key problems were identified:
- Battery issues
- Reaction time
- Floor-level detection
Smart Cane Prototype
To develop a prototype smart cane, we firstly selected one that was the most typical prototype on the basis of the review. As a battery-operated walking stick, the prototypical smart cane is equipped with ultrasonic sensors that are efficient enough to detect obstacles in an extended range, as compared to a white cane. Like most smart canes, this smart cane detects obstacles through the transmission of ultrasonic waves and the decoding of the received reflections to sense the presence of physical objects. These ultrasonic sensors make it possible to measure and detect the distances to moving and still objects. The cane is simple to operate and provides distance information directly. The detection range, including the length of the cane’s tip, may be adjusted based on the user’s preferences. Further, ultrasonic sensors provide a cost-efficient option as compared to previous cane designs that use lasers (Liu & Li, 2009). On the basis of detected obstacles, the smart cane produces vibrotactile feedback on the handle bar. The prototypical cane had a vibrotactile actuator to generate alerts on the handle when detecting obstacles within a range of 2 m and above knee-level (see Figure 1).
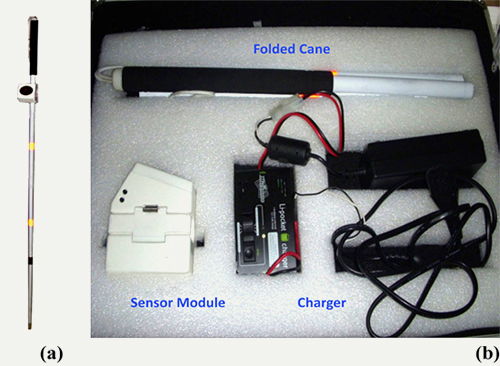
Figure 1. Prototype smart cane (a) and its components (b).
Performance-based Design Guideline Generation
This research presents a series of usability evaluations to develop design guidelines for a smart cane. More specifically, in this research we first had users experience the smart cane we selected and then interviewed these users. Mooy and Robben (1998) suggest that implicit product properties such as usability are best communicated by experiencing a product. Because a user experiences the usability of a product after purchasing it (Jokela, 2004; Keinonen, 1998; Nielsen, 2004), for an accurate assessment of the product’s properties it is important to measure the usability of a product after a user has had sufficient opportunities to experience the product. In the first study, we had visually impaired people navigate using both a white cane and a smart cane. We then measured the navigation results using performance metrics (in terms of time consumption and collision frequency). Following the experimental performance session, we conducted in-depth interviews to identify subjective difficulties and relevant issues. These quantitative and qualitative methods may provide comprehensive insights into the most effective design for a smart cane.
Study 1: Performance-based Prototype Experience and Evaluation
Elderly users with visual impairments performed a mobility task using a traditional white cane and a smart cane to allow us to examine the overall usability level of the smart cane compared to the white cane. The participants were first time users of a smart cane. In both conditions, the participants were divided into two groups of visually impaired people: white cane users and those with no white cane experience. After each participant performed the two tasks, they were then interviewed; it took about 20 min in total.
Participants and Experimental Design
A total of 20 volunteers participated. None of the participants had ever used a smart cane before this study. The participants were comprised of white cane users (n = 14; female = 8, male = 6; mean age = 60 years, SD = 9.4) with 7–50 years of cane experience, and non-white cane users (n = 6; female = 6; mean age = 62 years, SD = 7.0). An honorarium of up to USD $17 was given according to their overall performance to motivate them during their 20 min of participation. The participants were randomly assigned to the experimental conditions: cane types (smart cane versus white cane) and user types (experienced white cane users versus first-time users). The cane factor was a within-subjects factor and the user factor was a between-subjects factor.
Materials and Navigation Space
The white cane condition involved a typical cane that was 126 cm in length, with a folded length of 34.7 cm and a weight of 176 g. The smart cane described above had the same measurements as the white cane, except for the additional weight of approximately 320g of the detachable sensor module.
The experiment was conducted in a hall to simulate real-world conditions; there were randomly placed obstacles, a narrow pathway and three intersections. The test environment had 14 obstacles. 12 obstacles were perceptible with the traditional cane at floor level and were of various sizes and materials (e.g., bottles, boxes, flowers, and shoes). The other two obstacles, namely a hanging cloth and towel, were above knee-level and were difficult to detect using a traditional cane. The obstacles were randomly laid out in a navigation path (20.5 m × 3 m) between the walls. Figure 2 shows the route that the participants navigated as a line. The starting point was the entrance of the hall on the lower right.
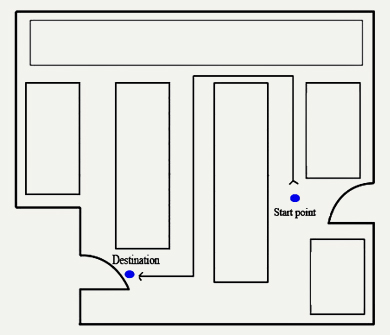
Figure 2. Navigation path in hallway.
A simple mathematical model was created to generate obstacle situations that were similar to real-world settings. These were also used to compare the test subjects and universal users (Kjeldskov & Skov, 2007).
Procedure
Prior to the experiment, the participants were interviewed using structured survey questions to gather demographic information such as age, sex and degree of visual impairment, as well as the extent of their previous white cane experience. Then, the participants were instructed on how to use the canes and were trained until they became familiar with them. After the training, the participants were taken to the navigation task space (Figure 2) where the main task began. Individual participants were asked to walk from the entrance and across a platform to the exit. The route included three intersections prior to the destination. Each participant used a white cane first, followed by a smart cane. After the experiment, the participants were asked to assess the difficulties, needs, satisfaction, purchase intention, preference and familiarity in order to measure the overall usability of the device. The participants were then debriefed and received their monetary compensation.
Measures
Through the experiment, we intended to identify how well users performed a navigation task with both a white cane and smart cane to assess the objective utility and effectiveness of the devices. According to Bohmann (2000), the accuracy of the performance was measured in terms of the task completion time and collision rates. The task completion time was the amount of time from the starting point until reaching a destination. The collision rate was the number of obstacles that the participant collided with during the navigation task. The most widely used mobility measures for the visually impaired are walking speed and the number of contacts with obstacles (Dowling et al., 2005). The purpose of using both the task completion time and collision rate was to provide more reliable data, because there may be a correlation between the task completion time and collision frequency. In this research, usability problems may be derived from the following considerations: The time it takes to reach the destination might be associated with the collision frequency, determined by whether users walk carefully enough to avoid hitting obstacles and whether the collision frequency makes a difference when there are no differences in the task completion times. Therefore, in addition to the task completion time, it is crucial to consider these conditions as an alternative measure to accurately measure usability.
Results and Discussion
Before evaluating the effectiveness of a smart cane during navigation, the task completion times were analyzed to determine the task times to compensate for the collision rate analysis later. A two-way mixed analysis of variance (ANOVA) was carried out with the cane types as a within-subjects factor and the user types (experienced white cane users versus first-time users) as a between-subjects factor for the completion time. The completion times were not significantly different between the white cane condition (M = 66.11, SD = 15.39) and smart cane condition (M = 68.26, SD = 18.66), F (1, 18) = 0.30, p = 0.59. The experienced white cane users (M = 62.79, SD = 15.44) tended to find the destination faster than the first-time users (M = 77.45, SD = 15.44). The difference was found to be statistically significant for the user types, F (1, 18) = 4.10, p = 0.05, but the interaction between the cane types and user types was not significant, F (1, 18) = 0.17, p = 0.69.
The above results showed that the task completion times between the white and smart cane conditions were not significantly different. Only the completion times between the user types were significantly different: Those with previous experience took less time than those without it, implying the familiarity effect, which explains a participant’s ability to respond more steadily to a familiar stimulus than to an unfamiliar stimulus (Ambler, 1976). Moreover, Blacklera (2010) indicated that performance is affected by the degrees of experience and familiarty. This was applicable in this experiment. Finally, although none of the participants had prior experience of using a smart cane, there were no walking speed differences between the white and smart cane, as noted above, nor were there any time differences between the cane types. It might be inferred that all of the participants, as novice users, confidently and effectively performed well using a smart cane. As such, we could proceed with the collision rate analysis without controlling the task time issue between cane types.
The collision rates were analyzed using a two-way mixed ANOVA that used the cane types as a within-subjects factor and the user types as a between-subjects factor. The results revealed that the smart cane condition (M = 6.55, SD = 1.86) appeared to have lower collision rates than the white cane condition (M = 7.95, SD = 1.16). In fact, the difference in the collision rates was significant, F (1, 18) = 7.54, p = 0.01. However, the effect of the user types was not significant: F (1, 18) = 1.75, p = 0.20. In addition, the interaction effect between the cane and user types was not significant: F (1, 18) = 0.31, p = 0.58. Thus, a smart cane was more useful for detecting and avoiding obstacles than a white cane, without increasing the time needed to detect obstacles. Overall, this implies that a smart cane is easy to use and more useful in avoiding obstacles than a white cane regardless of use or experience and the cane types does not affect the walking speed.
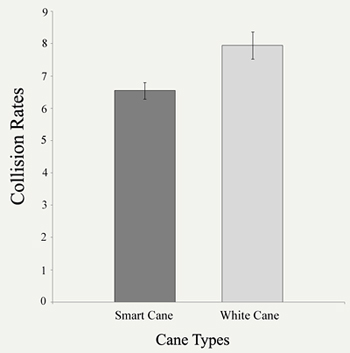
Figure 3. Mean and standard error bars of collision frequency.
Study 2: In-depth Interview
In-depth interviews were conducted to complement the quantitative experiment, the aim being to help develop insights into the individuals’ subjective experience of the smart cane. This study examined users’ experiences with the smart cane product and aspects of their preferences and needs when using the smart cane as compared to the white cane. One-on-one interviews were adopted to gather feedback on individual experiences, opinions, and feelings.
Participants and Procedure
All the participants with visual impairments (n = 20) were interviewed after using the white and electronic canes in the experimental session. After each participant performed the task, they were asked to answer a set of sample questions on the following topics: satisfaction with the aid, ease of use, purchase intention, functionality and preference. Finally, we asked the participants to comment on their overall impression of the electronic cane and any difficulties that they experienced during its use. We took notes during the interviews and all interviews were videotaped for future analysis.
Measures
The questionnaire contained five items to assess the overall usability issues related to the electronic cane. The five items (preference, satisfaction with the aid, ease of use, functionality, and purchase intention) were measured on a seven-point Likert-type scale. Each item was assigned ratings by the participants; these ratings ranged from “strongly disagree (1)” to “strongly agree (7).” Prior to assigning their ratings, the participants were asked to answer the following sample questions: 1) Do you prefer the electronic cane to the white cane? 2) Are you satisfied with the electronic cane? 3) Is the electronic cane easy to use? 4) Does the electronic cane provide adequate functions? 5) Do you intend to buy the electronic cane?
Results and Discussion
All the participants who had no smart cane experience before the study indicated that they were pleased with using the smart cane and actively presented their opinions. First, from the responses to the questionnaire used in the in-depth interviews, we found that participants responded with a high degree of (1) “preference” (M = 4.90, SD = 1.65), (3) “ease of use” (M = 6.00, SD = 0.32) and “purchase intention” (M = 5.35, SD = 1.46) (Figure 4). Additionally, 16 out of 20 participants who participated in the in-depth interviews intended to purchase the smart cane if it met the requirements of their expected price; the average expected price for the smart cane of this quality was 60 U.S. dollars. Price has been noted to influence the perception of overall product quality (Antonides, Oppendijk van Veen, van Raaij, & Schoormans 1999) and price can be assumed to be a factor that affects “purchase intention.”
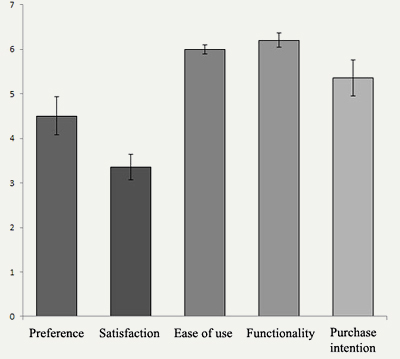
Figure 4. Mean and standard error bars for questionnaires.
Further, all the participants scored the smart cane the highest rate in their response to functions (M = 6.20, SD = 0.71), especially indicating that the vibrotactile haptic feedback was comfortable and reliable for them. Tactile and haptic interfaces cover specific user groups (the visually impaired) and provide guidance on how this information can be useful in assisting the blind (Bergman & Johnson, 1995). In fact, most devices for the blind are tactile-based, using the fingertips and palms as an alternative sense. Based on this evidence, all the participants were comfortable using the haptic feedback as expected, having experience of the use of vibrotactile information in their daily life.
The overall feedback of the participants during the in-depth interviews was positive. However, the responses to the “satisfaction” item (M = 3.30, SD = 0.92) showed the lowest rating, participants identifying the potential problems they face when using a smart cane. The current problems, for example, include the lost-in-the-space issue. Some users indicated that they lost their sense of direction while walking because the sensor direction was not indicated and users tended to turn the handle. Pointing the cane in the wrong direction could cause users to collide with obstacles. Users had problems with the detection of floor-level obstacles using the smart cane because, as previously stated, the detection sensor only faces upward while walking with the cane at an inclination. This is a common issue with other mobility aids for the visually impaired such as the haptic belt. One participant shared his experience with a haptic belt mobility aid with a detection sensor mounted over the belly button area. The belt can only detect from the center in a limited area, meaning that users have to twist their waists in the direction of the area they want covered. Participants with experience of using a white cane noted a weight issue with the smart cane.
Considering these issues, users reported a low “satisfaction” rating. However, in spite of the problems that they faced, as noted above, they gave a high score to purchase intention implying that the participants were eager to own an electronic mobility aid with new functions. Based on the interviews, the protocols were categorized to address current problems, minor improvements, and new functionality, as listed in Table 1. The improvement issues reported by the participants involved minor changes to the smart cane. For example, some participants remarked that they usually wear gloves in the winter, so they suggested increasing the vibration intensity. The new functionality options requested by the participants also included differential forms of feedback for different obstacles. For instance, stairs or moving obstacles might create an emergency situation. In such cases, a strong vibrotactile alert might be more suitable.
Table 1. Categorization of problems with smart cane.
The interviews captured the various ways participants described and explained their decisions, actions, experiences and opinions according to the categories of purchase intention, functionality, satisfaction, and preference. Collecting data in this way made it possible to examine their expectations toward mobility aid devices and identify the various constraints they faced. The responses to these criteria from the participants in the task performance group proved to be positive
Design Guidelines
On the basis of the quantitative evaluations, interviews from this research and relevant design guidelines for smart cane usability issues, we have established guidelines to resolve potential and existing usability problems with regard to smart cane designs. Further, after reviewing literature concerning smart canes, design guidelines were devised to build a usable smart cane that addressed users’ needs and expectations. In addition, the design guidelines for smart canes complied with the concepts of universal design (UD) for the visually impaired. The guidelines identified four main categories that needed improvement, as described below.
Effective Feedback
Individualize Stimulus Intensity
The vibration density issue may be categorized as limited stimulus detection according to the guidelines of van Erp (2003). To address this problem, there should be high variation in the thresholds of sensation and pain with temporal acuity degradation that considers the user’s age, suggesting that the intensity of the stimulus should be adjustable for users (van Erp, 2003). As it would be hard to accommodate the stimulus preferences of all users, the best solution is allowing the user to control the intensity. UD principles regarding flexibility in use can be partly addressed by providing options of varying the intensity levels. However, the vibration feedback options should be limited to no more than four intensity levels (van Erp, 2003). Too many options might hinder user adaptation by presenting an overload of intensity levels (Stanney, Mollaghasemi, Reeves, Breaux, & Graeber, 2003)
Provide Additional Feedback
The lack of different kinds of feedback was identified as a crucial missing function. The smart cane should enhance the haptic information by using the other available senses (Stanney et al., 2003). That is, because users may not notice complex objects based on just the haptic information, the cane could also provide audio signals to detect complex, emergent objects (Colwell, Petrie, Kornbrot, Hardwick, & Furner, 1998). By conveying additional information in more than one form, users would feel more secure and confident when walking with a smart cane. The UD principles of perceptible information and flexibility in use are employed when providing different feedback. Thus, this results in advancement in realizing an ideal UD. Indeed, an increase in confidence will make it more likely that the user will walk at their preferred speed with a decrease in unintended contacts with obstacles, as previously noted in the research (Clark-Carter, 1985; Hartong et al., 2004).
Optimize Haptic Interface
Providing a sense of direction is crucial for the visually impaired to assist users to navigate space. The direction indicator of a sensor might cause detection errors, which were identified in correlation to the walking speed and detection range in the case of the haptic belt. Miller and Zeleznikt (1999) state that a user interface that uses haptic feedback should provide an indication of the user’s surrounding conditions; users need to know in what direction they are headed. At present, because the location of the sensor on the cane’s handlebar is not marked, users are unable to discern whether the sensor is facing forward, which could cause them to lose their sense of direction. An important design improvement would be to have the indicator marked on the handlebar. For instance, a mark on the side of the round handlebar would allow users to know what direction the handlebar should be facing to accurately detect the direction and range (Figure 5a). By providing an indicator that detects proper sense of direction, the design becomes simple and intuitive and tolerance for error can be minimized.
Provide Reliable Information
Detection Range Enhancement
The user should scan their surroundings to detect obstacles for safety. However, as discussed above, our prototype smart cane had detection problems at floor level. It had an unreliable detection range. This issue was raised by a participant who had experience with a similar haptic belt issue, as previously noted. Further, SonicGuide, a popular system, does not detect obstacles at floor level (Ulrich & Borenstein, 2001). The cause was the single sensor’s limited coverage or detection range. Using multiple sensors could cover different directions and even a wide range regardless of the user’s direction of movement (Figure 5b). Tolerance for error is further addressed when providing reliable detection range.
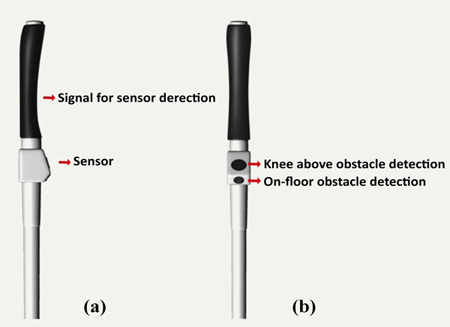
Figure 5. Signal for sensor direction (a) and detection at all levels of obstacles (b).
Fast Response
The time taken by the smart cane to signal the user about an obstacle is crucial for the safety of visually impaired people. A fast signal – one that is immediate and accurate – not only enables users to easily avoid obstacles and change paths, but also allows users more time to make decisions (Muhammad et al., 2010). A cane with a slow response time impedes the mobility of users. Therefore, providing effective prompting with a fast signal would address the UD principle regarding simplicity; haptics should be operated with high frame rates and low latency (Stanney et al., 2003), which will result in a fast response time.
Reinforcing Handling Issues
Enhancement of Battery Load
While sensory devices vary with the load, mobility requires continuous use without recharging. Users would be left with nothing but a traditional cane if the battery dies while they are mobile. The smart cane then becomes just a heavier cane without the technological benefits. Powering the smart cane is a major factor, especially as a mobility aid. A cane with rechargeable batteries should automatically control the energy demand, whether activated or not. It is helpful to save power consumption to ensure longer usage (Muhammad et al., 2010). Further, when it is in use, an indication of the battery charge level (high/medium/low) should be provided. This will result in a simple and intuitive design, as users would be prompted of battery level in an uncomplicated manner.
Ensuring Portability
The smart cane should be light. Because a visually impaired person may use it all day long, the smart cane could become too heavy to carry and hold. Therefore, weight reduction and portability are crucial factors. The current cane with a sensor module, including batteries, is 320 g heavier than a white cane. Moreover, users who require continuous and long use of the aid must carry a battery charger. However, minimizing the size of the wiring and designing a circuit board that can fit all of the electronics inside the cane would reduce the weight of the smart cane. Moreover, a very lightweight metal with a relatively small diameter, comparable in weight to that of traditional canes, would also be helpful in reducing the weight. By addressing size and space for approach and use of the device, users may be able to use the cane for extended periods.
Discussion and Further Research
By focusing on a smart cane with obstacle detection and indication, this research analyzed users’ needs and requirements to generate design guidelines for a smart cane. We sought to identify the most crucial functions of mobility aids when considering the cognitive capabilities and technological adaptability of elderly users. This study focused on what the performance tasks and interviews revealed and analyzed the areas needing improvement with regard to the primary function of a smart cane. We proposed four major categories related to the obstacle detector on the smart cane. In addition to this most necessary function, a desire for different types of feedback based on the obstacle type was observed.
Compared to the traditional white cane, we found that the smart cane provides a visually impaired person with many advantages. A smart cane is more effective in avoiding obstacles, which influenced the users’ higher preference and purchase intention for the smart cane. We anticipate that the four main problems we identified will help in redesigning the vibrotactile feature in mobility aids. We can also infer that the design guidelines we posed could be useful in improving other smart products for mobility aids.
In addition, we found from the in depth-interviews that preference was positively correlated with intent to purchase, but not with full satisfaction. In spite of some dissatisfaction with the product, the users did want to purchase a smart cane to improve their mobility. Despite the fact that usability is comprised of both preference and performance factors and that satisfaction has a great deal in common with preference (Keinonen, 1998), satisfaction did not meet the preference in the current study. However, this implies that users gave high marks based on the potential utility of the smart cane. Generally, when people prefer one thing to another, they use it more, because it provides greater ease and comfort (Zajonc & Markus, 1982), which is one possible explanation for the unpopularity of the smart cane. However, it is important to remember that the opportunity for independent mobility is an important factor in determining the overall usability when considering a cane. There are certain restraints that have not allowed a real-life demonstration of the navigation experiment. Real-life experiment (e.g., outdoor experiment) with redesigned feature is a possibility in future work.
Finally, price was identified as a key issue. Smart cane products do not seem to meet the users’ expected price range and many users cannot afford one (Abdel-Wahab & El-Masry, 2011). The existing smart canes are generally USD $200. This seems expensive compared to a white cane, which is less than USD $20. This problem could be solved if the product were widely available; mass production would bring the price down. Further, when the price of the smart cane is linked to the quality, the price is perceived as high. To achieve price justification, the product’s utility and value should be enhanced by making adjustments to meet user expectations.
Price is one of the factors that will promote access by users and determine the perception of quality. As noted above, the price kept most users from seeking electronic mobility aids. In future research, it will be important to conduct pricing surveys to improve the product, as the likelihood of purchase may rise if the product is sold at the expected price. There are a variety of methods that could be beneficial in this process, including conjoint analysis, Van Westendorp models and price rating scales. These approaches would have significant benefits for the development process and use of a smart cane.
Applying universal design principles can make a product fully accessible to people with a wide range of abilities and disabilities. Companies can improve the accessibility of their products in a more systematic way by employing UD (Lebbon & Coleman 2003). It might provide benefits and better solutions for the disabled based on their needs and requirements. Rose and Meyer (2002) indicate that, “[a]dressing the divergent needs of special populations increases usability for everyone” (p. 71). Yet, many firms even today are not encouraged to employ universal design (McAdams & Kostovich, 2011). Worldwide, the disabilities population has increased from 10% to 15% since the 1970s (WHO, 2011). As the disabled population continues to grow, usable design with guidelines will be a significant factor in understanding the needs of the disabled and improving their quality of life.
Acknowledgments
This research was supported by grants from the World-Class University program (R31-2008-000-10062-0) of the Korean Ministry of Education, Science and Technology via the National Research Foundation and from the Industrial Strategic Technology Development Program (10043388) funded by the Ministry of Knowledge Economy, Republic of Korea.
References
- Abdel-Wahab, A. G., & El-Masry, A. A. A. (2011). Mobile information communication technologies adoption in developing countries: Effects and implications. Hershey, PA: IGI Global.
- Ambler, B. A., & Proctor, J. D. (1976). The familiarity effect for single-letter pairs. Journal of Experimental Psychology: Human Perception and Performance, 2(1), 222-234.
- Antonides, G., Oppendijk van Veen, W. M., van Raaij, W. F., & Schoormans, J. P. L. (1999). Product and consument [Product and consumer]. Lemma, Utrecht.
- Bay Advanced Technologies. (n.d.). BAT “K” sonar: Ultrasonic sensing device for the blind. Retrieved April 20, 2012, from http://www.batforblind.co.nz
- Bergman, E., & Johnson, E. (1995). Towards accessible human-computer interaction. In J. Nielsen (Ed.), Advances in human-computer interaction (pp. 87-113). Norwood, NJ: Ablex Publishing.
- Birren, J. E., Woods, A. M., & Williams, M. V. (1980). Behavioral slowing with age: Causes, organization, and consequences. In L. W. Poon (Ed.), Aging in the 1980s: Psychological issues (pp. 293-308). Washington, DC: American Psychological Association.
- Blacklera, A., Popovica, V., & Maharb, D. (2010). Investigating users’ intuitive interaction with complex artifacts. Applied Ergonomics, 41(1), 72-92.
- Bohmann, K. (2000). User performance metrics. Retrieved April 20, 2012, from http://www.bohmann.dk/articles/user_performance_metrics.html
- Clark-Carter, D. (1985). Factors affecting blind mobility (Doctoral Thesis). Nottinghamshire, UK: University of Nottingham.
- Clark-Carter, D. D., Heyes, A. D., & Howarth, C. I. (1986). The efficiency and walking speed of visually impaired people. Ergonomics, 29(6), 779-789.
- Collins. C. (1984). On mobility aids for the blind. In D. H. D. Warren, & E. R. Strelow (Eds.), Proceedings of the NATO Advanced Research Workshop on Visual Spatial Prostheses for the Blind. Boston, MA: Martinus Nijhoff Publishers.
- Colwell, C., Petrie, H., Kornbrot, D., Hardwick, A., & Furner, S. (1998). Haptic virtual reality for blind computer users. In Proceedings of the 3rd International ACM Conference on Assistive Technologies (pp. 92-99). New York, NY: ACM Press.
- Czaja, S. J., & Sharit, J. (1998). Ability-performance relationships as a function of age and task experience for a data entry task. Journal of Experimental Psychology: Applied, 4(4), 332-351.
- Damaschini, R., Legras, R., Leroux, R., & Farcy, R. (2005). Electronic travel aid for blind people. Assistive Technology: From Virtuality to Reality, 16(1), 251-255.
- Dowling, J. (2007). Mobility enhancement using simulated artificial human vision (Doctoral Thesis). Brisbane, Australia: Queensland University of Technology.
- Dowling, J., Boles, W., & Maeder, A. (2005). Mobility assessment using simulated artificial human vision. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (vol. 3, p. 32). San Diego, CA: IEEE Computer Society.
- Eric, T. (2008). Infrared vs. ultrasonic – What you should know. Retrieved April 20, 2012, from http://www.societyofrobots.com/member_tutorials/node/71
- Farcy, R., Leroux, R., Damaschini, R., Legras, R., Bellik, Y., Jacquet, C., … Pardo, P. (2003). Laser telemetry to improve the mobility of blind people: Report of the 6 month training course. In Proceedings of the 1st International Conference on Smart Homes and Health Telematics (vol. 12, pp. 113-115). Paris, France: los Press Inc. Available at http://www.lac.u-psud.fr/teletact/publications/report_training.htm
- Farcy, R., Leroux, R., Jucha, A., Damaschini, R., Gregoire, C., & Zogaghi, A. (2006). Electronic travel aids and electronic orientation aids for blind people: Technical, rehabilitation and everyday life points of view. In M. A. Hersh (Ed.), Proceedings of the 4th Conference and Workshop on Assistive Technology for Vision and Hearing Impairment (p. 18). Kufstein, Austria: Euro Assist VHI-4.
- Garg, A., Balakrishnan, M., Paul, K., Paul, R., Mehra, D., Singh, V., Manocha, D. (2007). Cane mounted knee-above obstacle detection and warning system for the visually impaired. In Proceedings of the 11th International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (pp. 143-151). New York, NY: American Society of Mechanical Engineers.
- Hartong, D. T., Jorritsma, F. F., Neve, J. J., Melis-Dankers, B. J., & Kooijman, A. C. (2004). Improved mobility and independence of night-blind people using night-vision goggles. Investigative Ophthalmology & Visual Science, 45(6), 1725-1731.
- Hatwell, Y., Streri, A., & Gentaz, E. (2003). Touching for knowing. Cognitive psychology of haptic manual perception. Amsterdam, the Netherlands: John Benjamins.
- Jacquet, C., Bellik, Y., & Bourda, Y. (2006). Electronic locomotion aids for the blind: Towards more assistive systems. Studies in Computational Intelligence, 19, 133-163.
- Jacquet, C., Bourda, Y., & Bellik, Y. (2004). A context-aware locomotion assistance device for the blind. In Proceedings of the 18th British HCI Group Annual Conference (pp. 315-328). London, UK: Springer-Verlag.
- Jokela, T. (2004). When good things happen to bad products: Where are the benefits of usability in the consumer appliance market? Interactions, 11(6), 28-35.
- Kanagaratnam, K. (2009). Smart mobility cane: Design of obstacle detection. EE 4BI6 Electrical Engineering Biomedical Capstones. Paper 8. Ontario, Canada: DigitalCommons@McMaster.
- Kay, L. (1974). A sonar aid to enhance spatial perception of the blind: Engineering design and evaluation. Radio and Electronic Engineer, 4(11), 605-627.
- Keinonen, T. (1998). One-dimensional usability - Influence of usability on consumers’ product preference (Doctoral Thesis). Helsinki, Finland: University of Art and Design.
- Kjeldskov, J., & Skov, M. B. (2007). Studying usability in sitro: Simulating real world phenomena in controlled environments. International Journal of Human-Computer Studies, 22(1), 7-37.
- Lacey, G., Dawson-Howe, K. M., & Vernon, D. (1995). Personal autonomous mobility aid for the frail and elderly blind (Technical Report, No. TCD-CS-95-18). Dublin, Ireland: Trinity College.
- Lebbon, C., & Coleman, R. (2003). A designer-centered approach. In J. Clarkson, R. Coleman, S. Keates, & C. Lebbon (Eds.), Inclusive design: Design for the whole population (pp. 500-519). London, UK: Springer-Verlag.
- Leonard, R. (2002). Statistics on vision impairment: A resource manual (5th ed.). New York, NY: Arlene Gordon Research Institute of Lighthouse International.
- Levesque, V. (2005). Blindness, technology and haptics (Technical Report, No. TR-CIM-05.08). Montréal, Canada: McGill University.
- Liu, A., & Li, P. (2009). GPS integrated smart cane for the blind. Retrieved April 20, 2012, from http://jhir.library.jhu.edu/handle/1774.2/33711
- MacDonald, S. W. S., Nyberg, L., Sandblom, J., Fischer, H., & Backman, L. (2008). Increased response-time variability is associated with reduced inferior parietal activation during episodic recognition in aging. Journal of Cognitive Neuroscience, 20(5), 779-787.
- Manduchi, R., & Coughlan, J. M. (2012). (Computer) vision without sight. Communications of the ACM, 55(1), 96-104.
- Manduchi, R., & Kurniawan, S. (2011). Mobility-related accidents experienced by people with visual impairment. Research and Practice in Visual Impairment and Blindness, 4(2), 44-54.
- Manduchi, R., & Kurniawan, S., & Bagherinia, H. (2010). Blind guidance using mobile computer vision: A usability study. In Proceedings the 12th International SIGACCESS Conference on Computers and Accessibility. New York, NY: ACM.
- Mau, S., Melchior, N. A., Makatchev, M., & Steinfeld, A. (2008). BlindAid: An electronic travel aid for the blind (Technical Report, No. CMU-RI-TR-07-39). Pittsburgh, PA: The Robotics Institute at Carnegie Mellon University.
- McAdams, D. A., & Kostovich, V. (2011). A framework and representation for universal product design. International Journal of Design, 5(1), 29-42.
- Miller, T., & Zeleznik, R. (1999). The design of 3D haptic widgets. In J. Rossignac, J. K. Hodgins, & J. D. Foley (Eds.), Proceedings of the 1999 Symposium on Interactive 3D Graphics (pp. 97-102). New York, NY: ACM Press.
- Mooy, S. C., & Robben, H. S. J. (1998). How consumers learn from and about products: The impact of direct experience. Advances in Consumer Research, 25(1), 318-323.
- Muhammad, A., Khan, M. U. A., Azhar, H., Masood, A., & Bakhshi, M. S. (2010). Analytical study of intelligent assistants to help blind people in avoiding dangerous obstacles. Journal of American Science, 7(8), 480-485.
- Nielsen, J. (2004). Why consumer products have inferior user experience. Retrieved April 20, 2012 from http://www.nngroup.com/articles/why-consumer-products-have-bad-ux/
- Pelli, D. G. (1986). The visual requirements of mobility. In G. C. Woo (Ed.), Low vision: Principles and applications (pp. 134-146). New York, NY: Springer-Verlag.
- Roentgen, U. R., Gelderblom, G. J., Soede, M., & de Witte, L. (2008). Inventory of electronic mobility aids for persons with visual impairments: A literature review. Journal of Visual Impairment and Blindness, 102(11), 702-724.
- Rose D. H., & Meyer, A. (2002). Teaching every student in the digital age: Universal design for learning. Alexandria, VA: Association for Supervision and Curriculum Development.
- Rubin G. S., & Salive M. E. (1995). Vision and hearing. In J. M. Guralnik, L. P. Fried, E. M. Simonsick, J. D. Kasper, & M. E. Lafferty (Eds.), The women’s health and ageing study: Health and social characteristics of older women with disability (No. 95-4009). Bethesda, MD: National Institute on Ageing.
- Sander, M. S., Lelievre, M. C. B. F., & Tallec, D. A. (2005). Les personnes en situation de handicap visuel. Apports de l’enquete handicaps-incapacities-d´ependances [The people with visual impairment. Contributions of the survey handicap-incapacities-dependencies]. Rapport d’enquete du Ministere Francais de la Sant´eet des Solidarities. Paris, France: Institut de Veille Sanitaire.
- Sherrick, C. A., & Cholewiak, R.W. (1986). Cutaneous sensitivity. In K. R. Boff, L. Kaufman, & J. P. Thomas (Eds.), Handbook of perception and human performance (pp. 12-1--12-57). New York, NY: John Wiley and sons.
- Singh, V., Paul, R., Mehra, D., Gupta, A., Sharma, V. D., Jain, S. … Manocha, D. (2010). ‘Smart’ cane for the visually impaired: Design and controlled field testing of an affordable obstacle detection system. In Proceedings of the 12th International Conference on Mobility and Transport for Elderly and Disabled Persons (TRANSED 2010). Hong Kong: The Hong Kong Society for Rehabilitation; S. K. Yee Medical Foundation; Transportation Research Board. Available at http://trid.trb.org/view.aspx?id=1127152
- Sound Foresight. (n.d.). Sound foresight technology relaunch the UltraCane, a mobility aid. Retrieved April 20, 2012, from http://www.yorkpress.co.uk/news/business/news/ 9298784.Sound_Foresight_Technology_relaunch_mobility_aid/
- Stanney, K. M., Mollaghasemi, M., Reeves, L., Breaux, R., & Graeber, D. A. (2003). Usability engineering of virtual environments (VEs): Identifying multiple criteria that drive effective VE system design. International Journal of Human-Computer Studies, 58(4), 447-481.
- Ulrich, I., & Borenstein, J. (2001). The GuideCane: Applying mobile robot technologies to assist the visually impaired. IEEE Transactions on Systems, Man, and Cybernetics, 31(2), 131-136.
- van Erp, J. B. F. (2002). Guidelines for the use of vibro-tactile displays in human computer interactions. In S. A. Wall, B. Riedel, A. Crossan, & M. R. McGee (Eds.), Proceedings of 2nd Annual Meeting of EuroHaptics (pp. 18-22). Edinburgh, UK: University of Edinburgh.
- Vistac. (n.d.). Vistac laser long cane. Retrieved April 20, 2012, from http://www.vistac.com/Alt/LLc_gb/VISTAC_Laser_Long_Cane.html
- Welford, A. T. (1980). Choice reaction time: Basic concepts. In A. T. Welford (Ed.), Reaction times (pp. 73-128). New York, NY: Academic Press.
- World Health Organization. (2012). Visual impairment and blindness. Retrieved April 20, 2012, from http://www.who.int/mediacentre/factsheets/fs282/en/
- Yen, D. H. (1996). Electronic travel aids for the blind. Retrieved April 20, 2012, from http://www.noogenesis.com/ETA.html
- Zajonc, R. B., & Markus, H. (1982). Affective and cognitive factors in preference. Journal of Consumer Research, 9(2), 123-131.
